
Photo documentation improvements
Possibility to drag and drop the file as attachment to the step
Measuring on the photo beta
Starting now in some cases it is possible to measure on the photos, we know the algorithm is not yet perfect, but we are constantly improving it. Please try and give us a feedback.
Possibility to download equirectangular jpeg
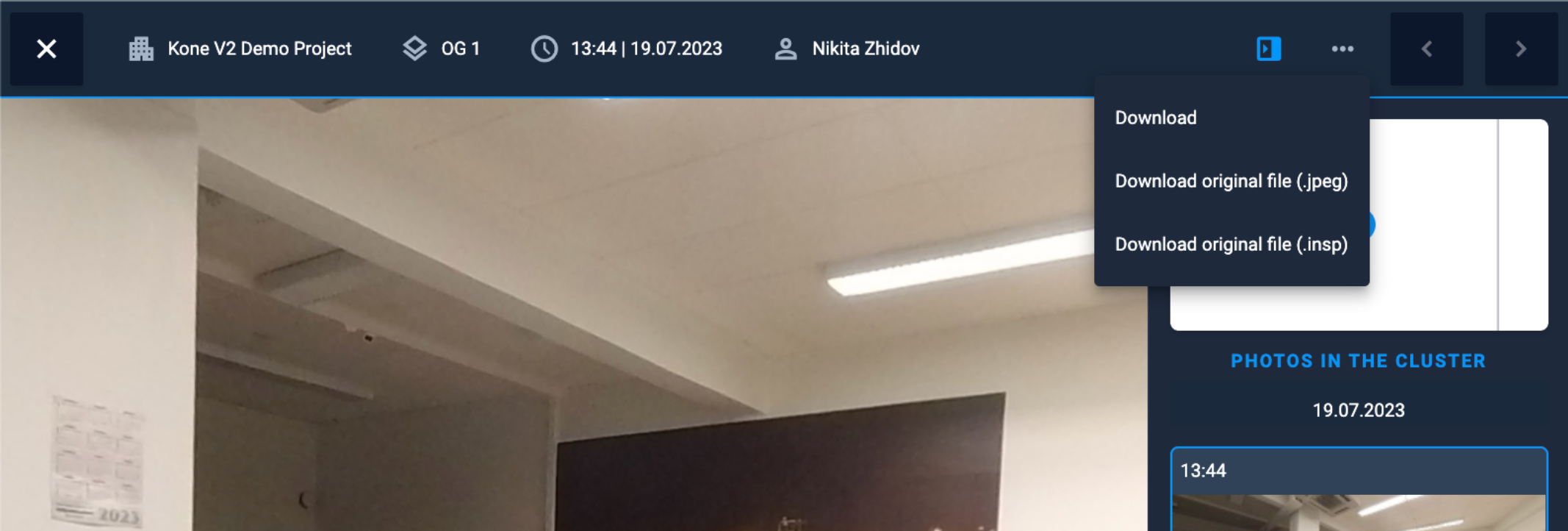
Now it is possible to download the current view, original file made by camera and equirectangular jpeg to be used in other software if needed.
Possibility to zoom in comparison mode
Added the possibility to zoom in comparison mode.
Validation of steps
We have improved validation of steps to prevent sending robot to for example the removed map.
Usability improvements
- Now when return back from specific mission execution to list of executions we store the scrolling position. No need to scroll the list again
- Improved scrolling on touch devices when there are many steps in the list
- If robot is offline – cloud will trigger uploading photos from device once it will be back online
Maps improvements
Possibility to reset rotation of the map
It is complicated to drag the point to 0 using slider. Now we have a button to quickly reset the rotation back to 0 with one button click.
Smooth map animation
Now we show unknown area gradually making it visible as user zooms in. In mapping mode the unknown zone will still be always shown.
Sharper maps
Added antialiasing for maps rendering, now they look generally sharper.
Download floor plan
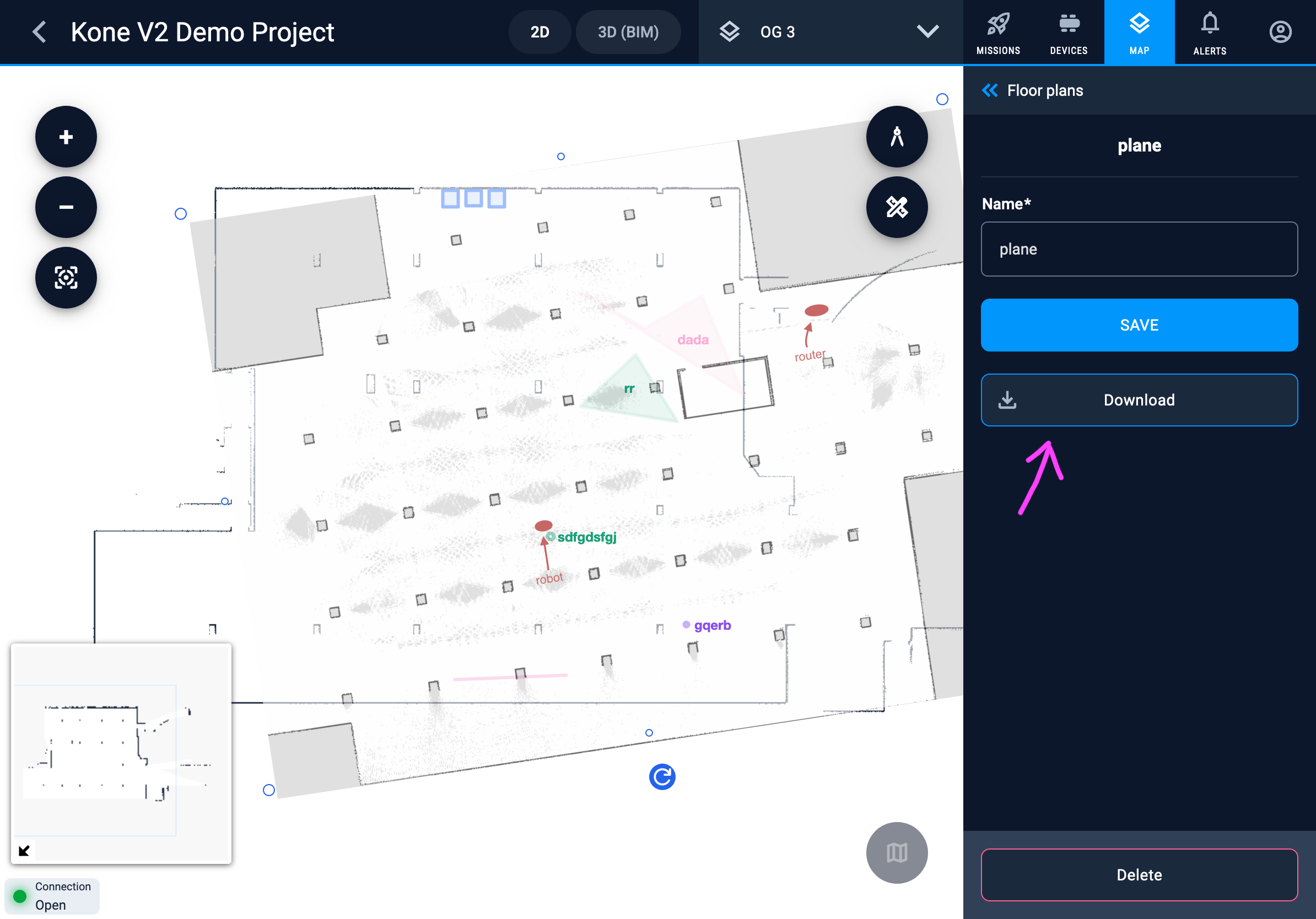
Now it is possible to download the floor plan source image.
Better usability while mapping
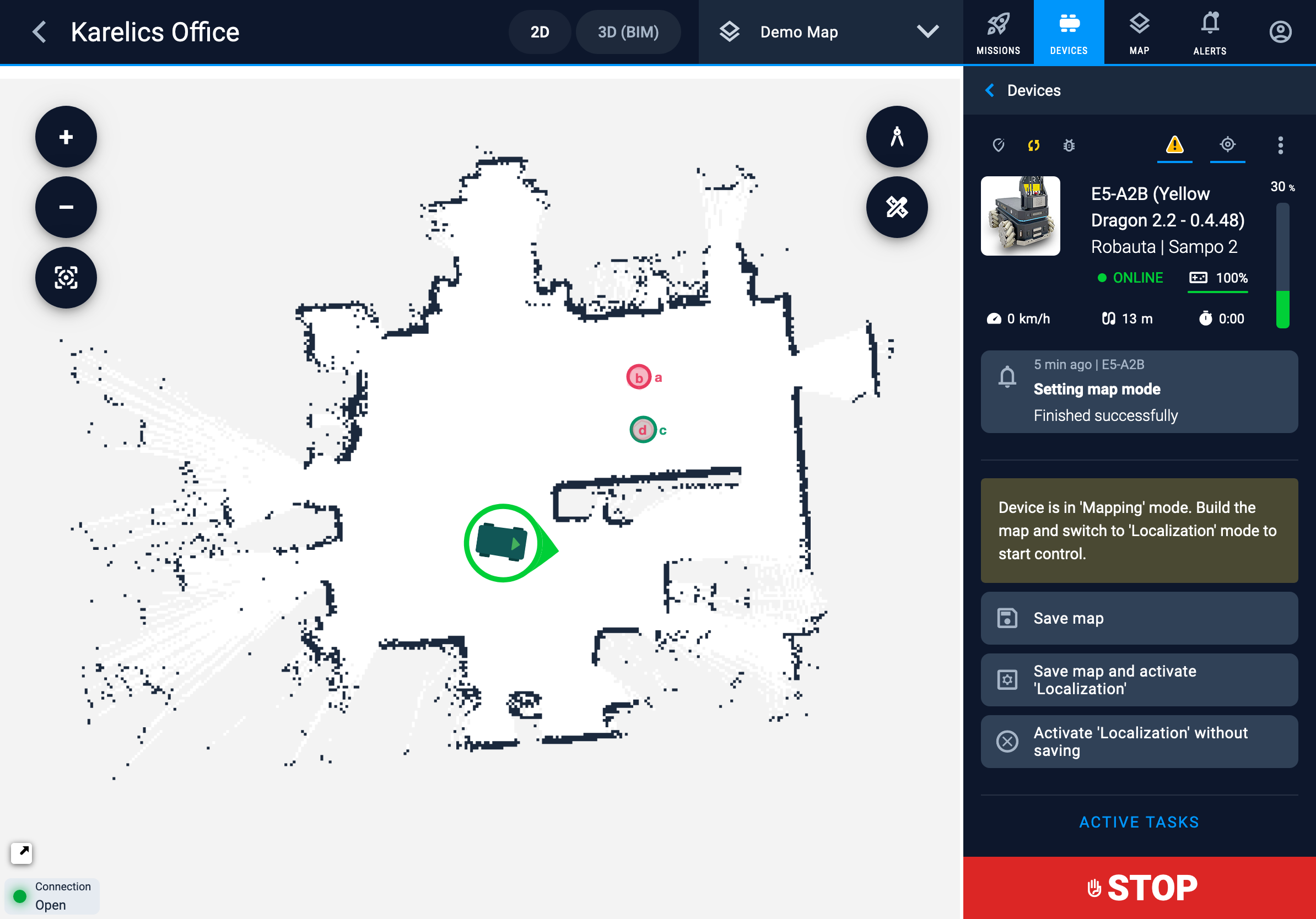
Now when robot is in mapping mode we show the available buttons directly on the operation sidebar making it more accessible in multi-robot setup.
General improvements
Robots usability
Maps history
It is so easy to brake the map while mapping on for example a slippery surface while preparing the project. The chances are bigger when map is huge. Now it is possible to restore the map to any previously saved versions of the map.
But this feature becomes especially useful when robot updates the map when it changes, which during construction happens very often when for example a new wall had been built. THe new version is generated when an eraser was used too.
When the map is restored – the selected version will be just added again on top of the stack – so no version is lost at any time and it will be synched to all robots on the project.
Improved “unhealthy” status handling
Now robot will be marked as Unhealthy when some health monitoring item will have the error state.
Health monitoring is now shown for users with operator permissions.
Stability improvements
- Fixed Health monitoring layout issue in Firefox
- Fixed issue when for some robots mission execution was stuck showing “in progress” state
- Managing of active tasks is now more reliable in edge cases like robot being offline for some time
- Added different fallbacks UI improvements in image processing
- Robot information is available even when robot is offline
- Added new device type icons in new fresh design
- Improved onboarding flow for new users
- Improved restoring of older version of map
- Fixed infinite reloading when in some situations open a 360 photo preview on iPad
- Improved stability of mission tasks transitions
- Returned previously removed eraser for map
- Improved permissions handling when user assigning some device from another company to his project
- Infinite scroll was working wrong in free-devices dropdown
- Disabled a possibility to launch the mission while device is charging
