
Opensource
Leaflet Path Transform
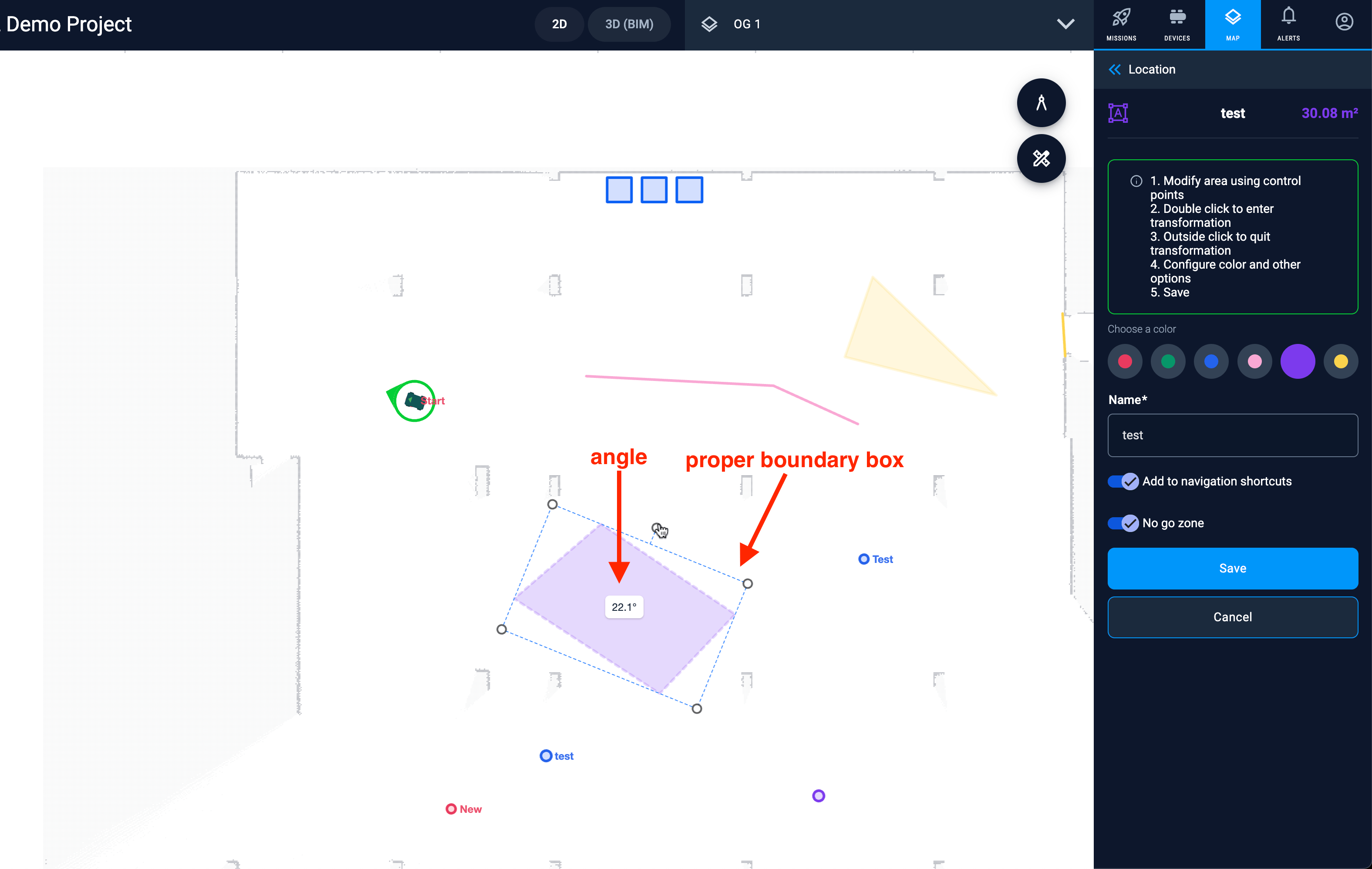
New Opensource package from Karelics. Drag/rotate/resize handler for Leaflet vector features. The original library works only with SVG renderer, but we use Canvas renderer to support click tolerance. This fork adds canvas renderer in Leaflet.Path.Transform.
At the same time we have removed the hardcoded Path.Drag which if needed can be added separately.
Added the showing of the rotation angle and fixed support of touch devices.
Mission management
New mission: Straight line navigation
The new mission was added, that supports navigation between 2 points. Device will keep the back-middle point over the line between the points. If device is not on the line it will find the most closest way to come to the line. The line consider to be infinite before the first point.
This mission is useful for equal material distribution, painting or scanning activities.
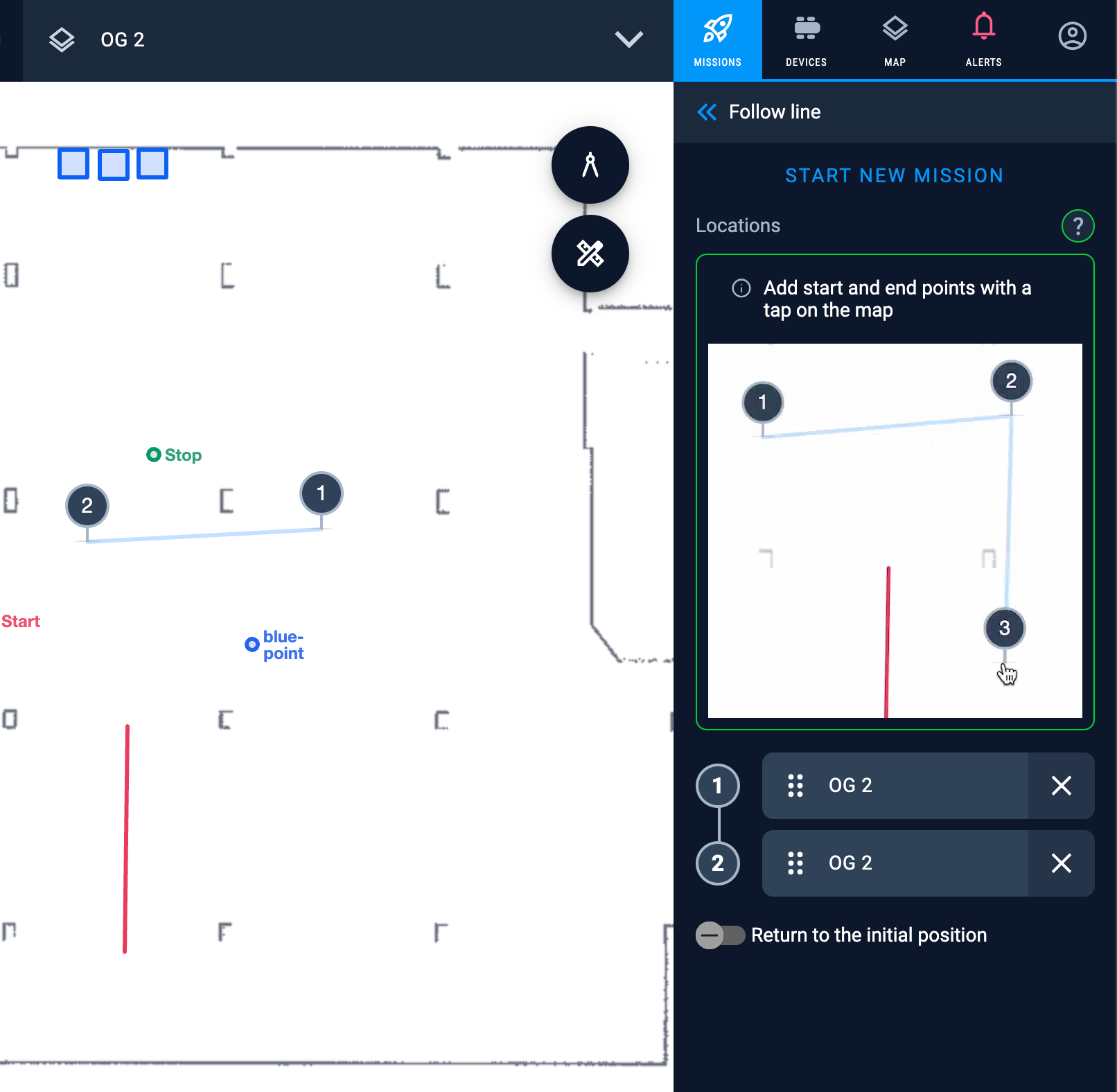
To run the mission just tap on the map at 2 points and choose the device to go. Points must be on the same map.
Copy mission
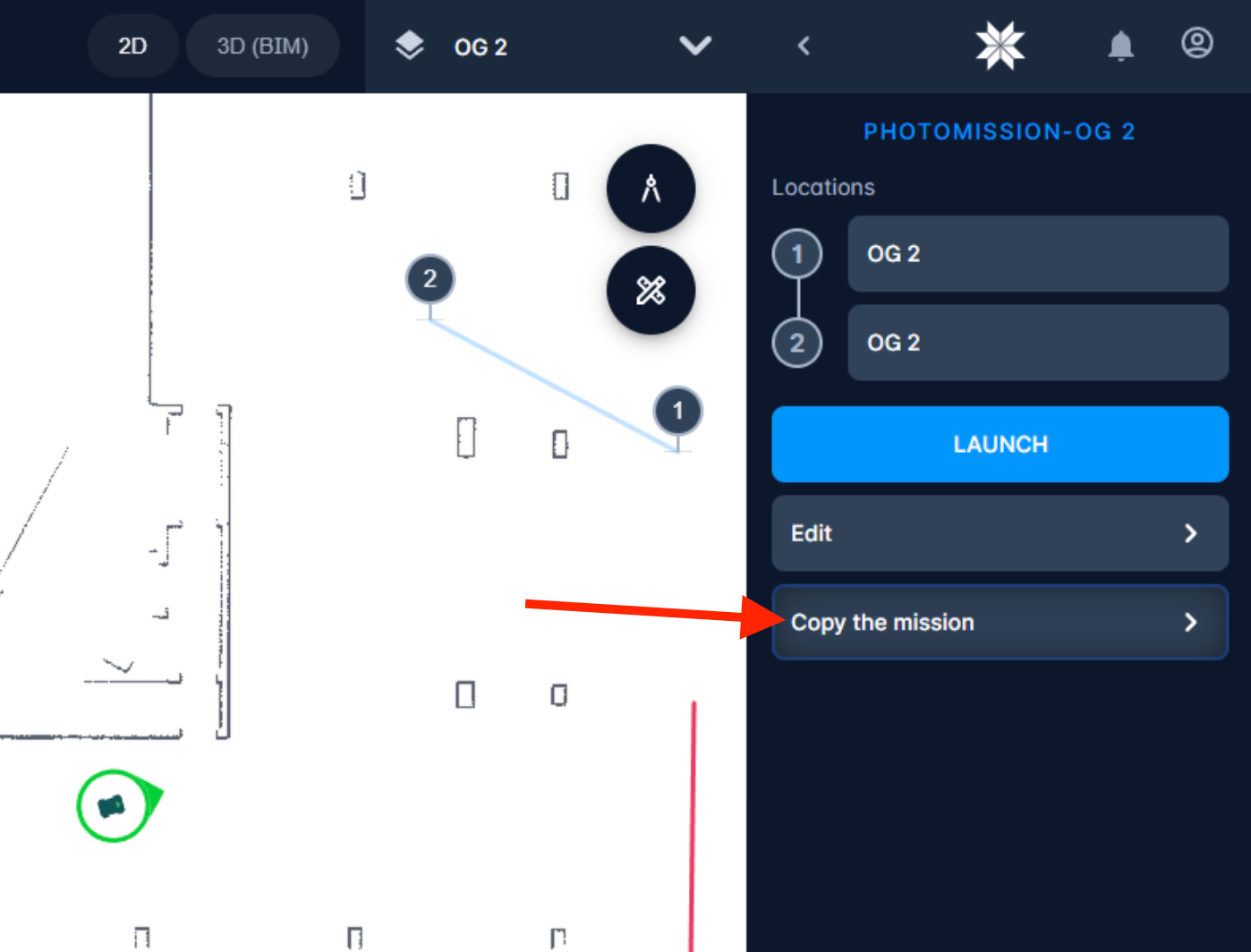
As many users asked – added possibility to copy the mission. Especially useful when the mission has many points on different floors and should contain about the same amount of points but with some little difference. Now you don’t need to do the complete setup from scratch again.
Photo documentation
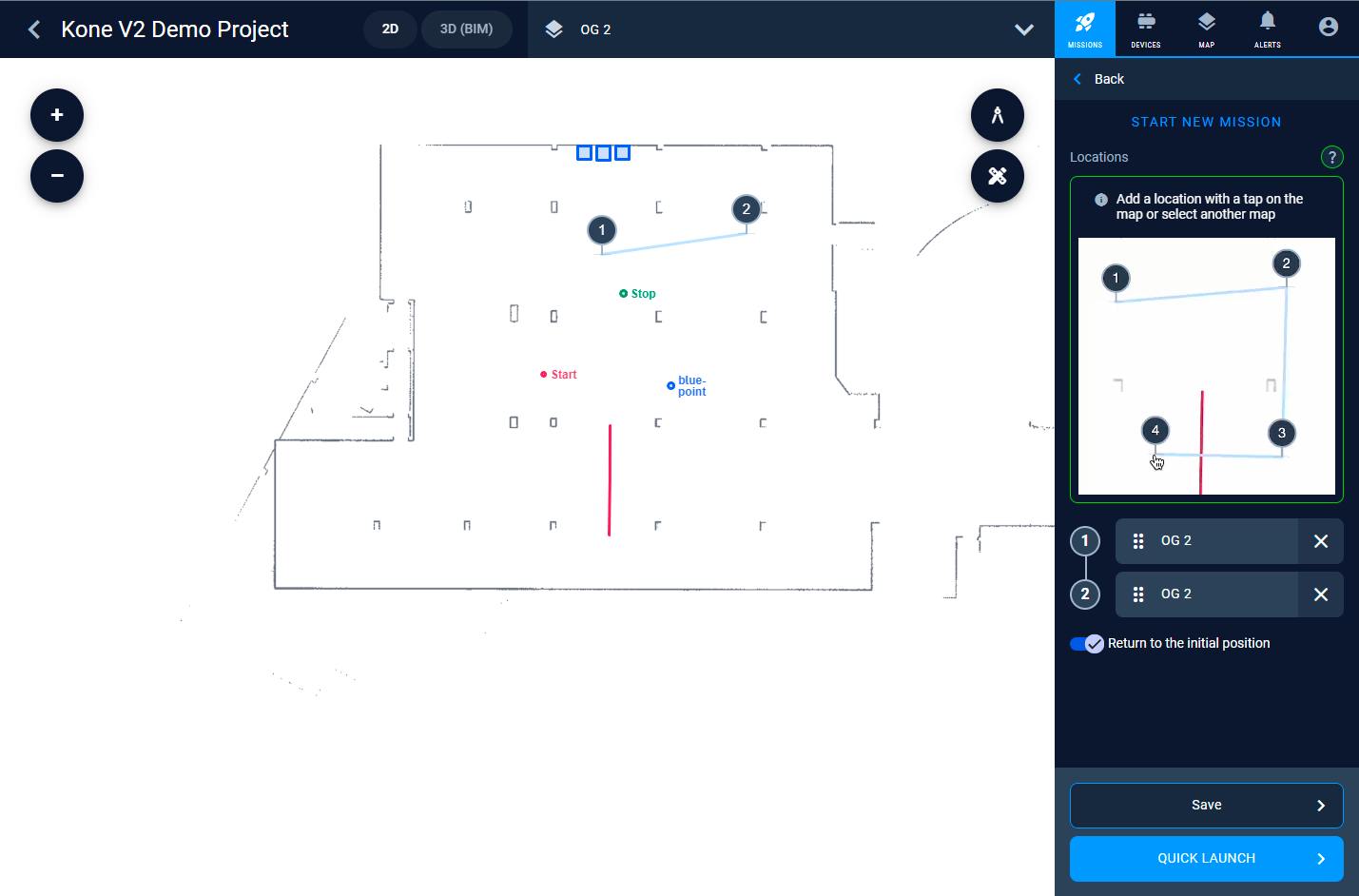
New option to return to the initial position
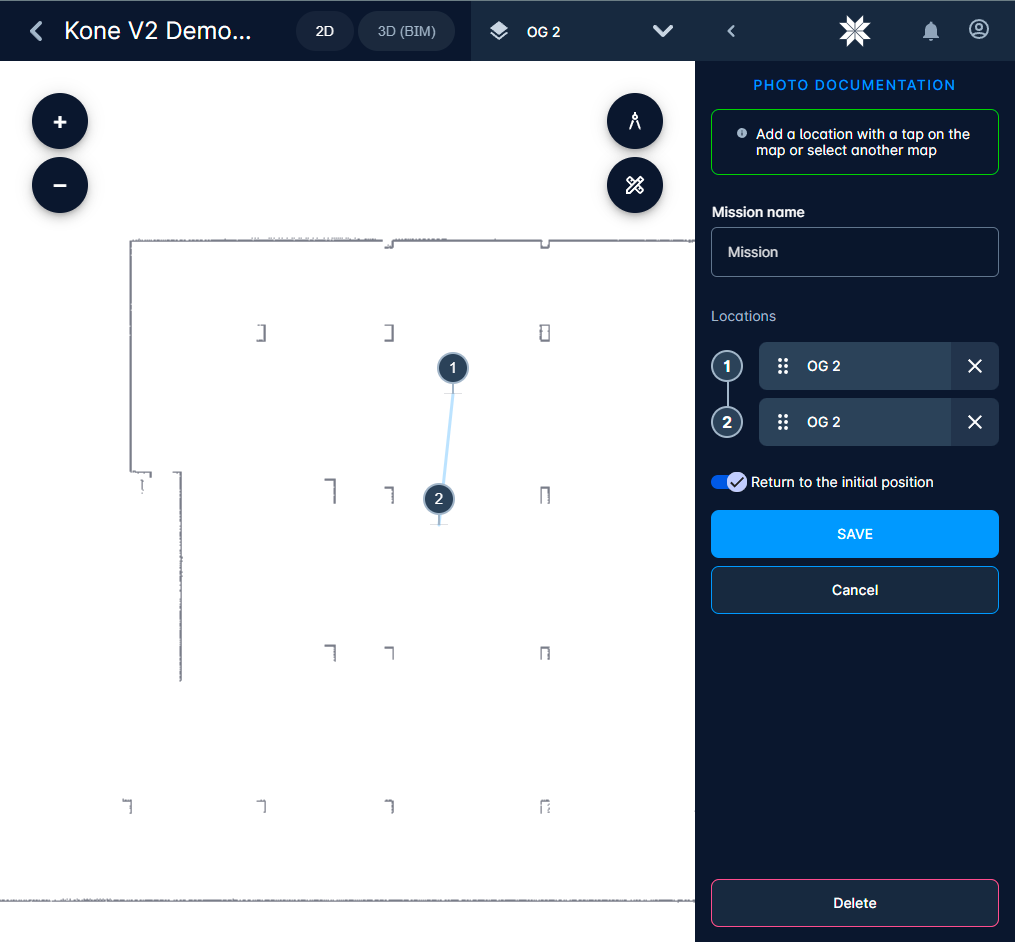
Now you can ask device to return to the initial position after mission completion. It is useful when device needs to execute missions regularly and the starting point is near the charging station. This property can be saved in the mission as default value, but can be overwritten before each launch when needed.
Better header in preview
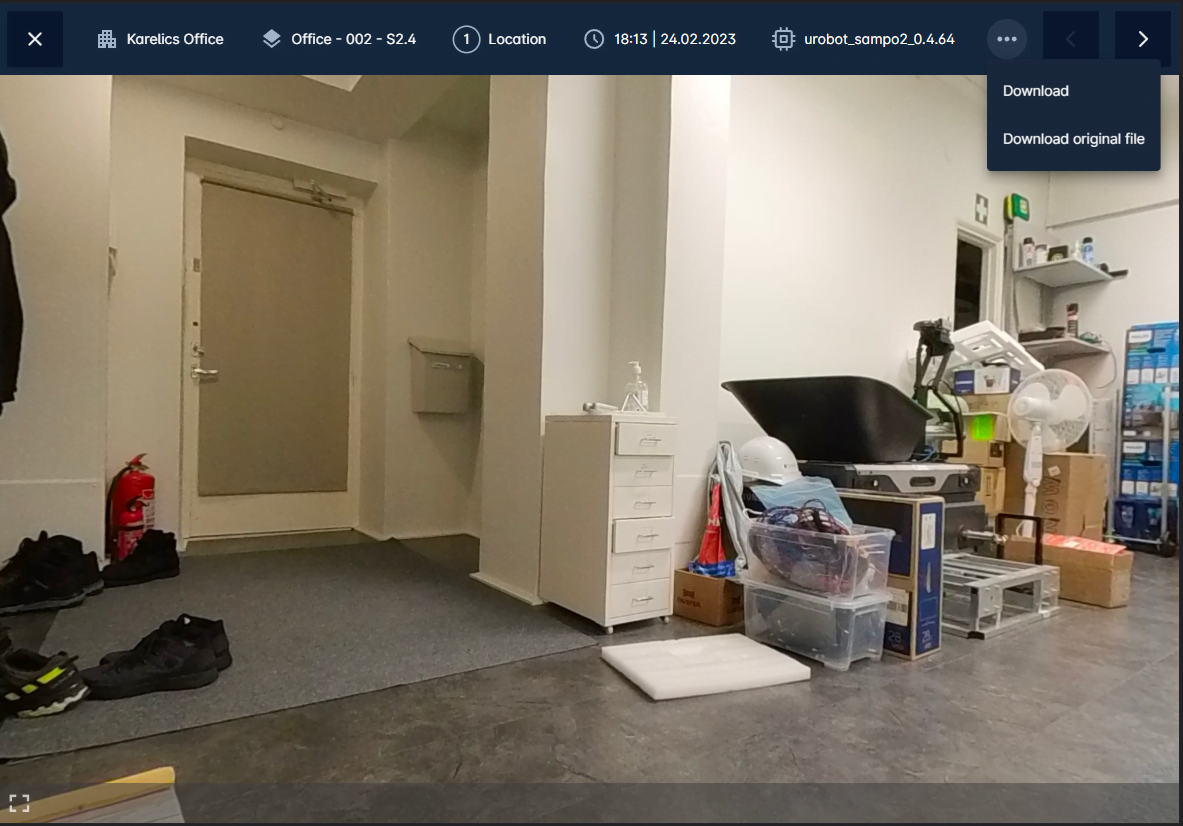
Now 360-picture preview works well on different screen sizes including mobile.
Validation of points
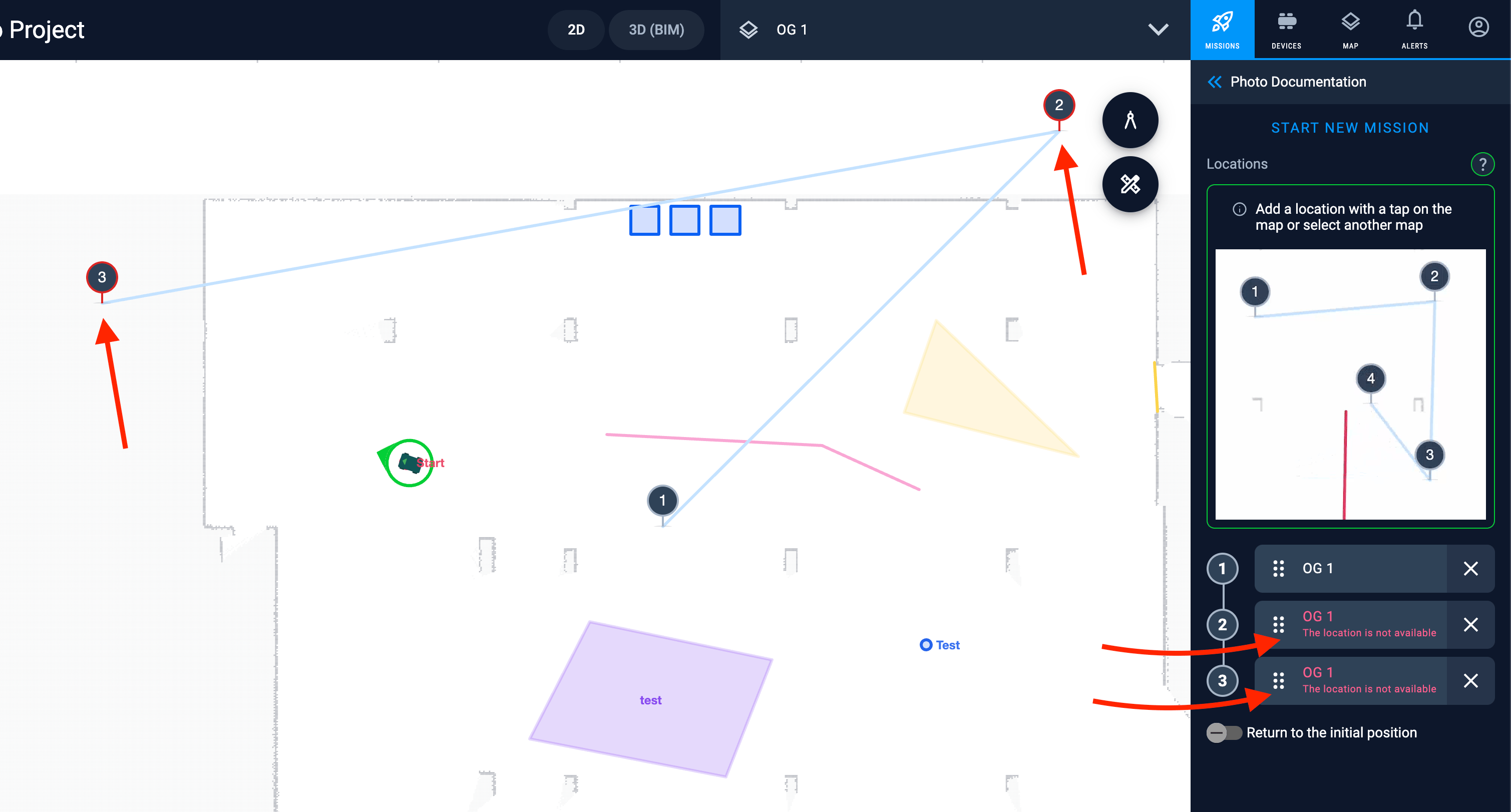
When the map has changed – some walls added or some areas are now occupied; or when user tries to set the point in unknown area – we will validate the steps to be reachable by the device and will warn the user if his path has some problems. This may happen within time – so we check it every time before executing the mission. We check it even if the location is on another map – user will see the corresponding warning message.
Other improvements
Project notifications are now available on the project page

Now users can see device notifications on the project page too. This helps to get information about mission execution completion or different possible problems in execution without a need to open any map while on the project page.
Showing the stairs mode icon
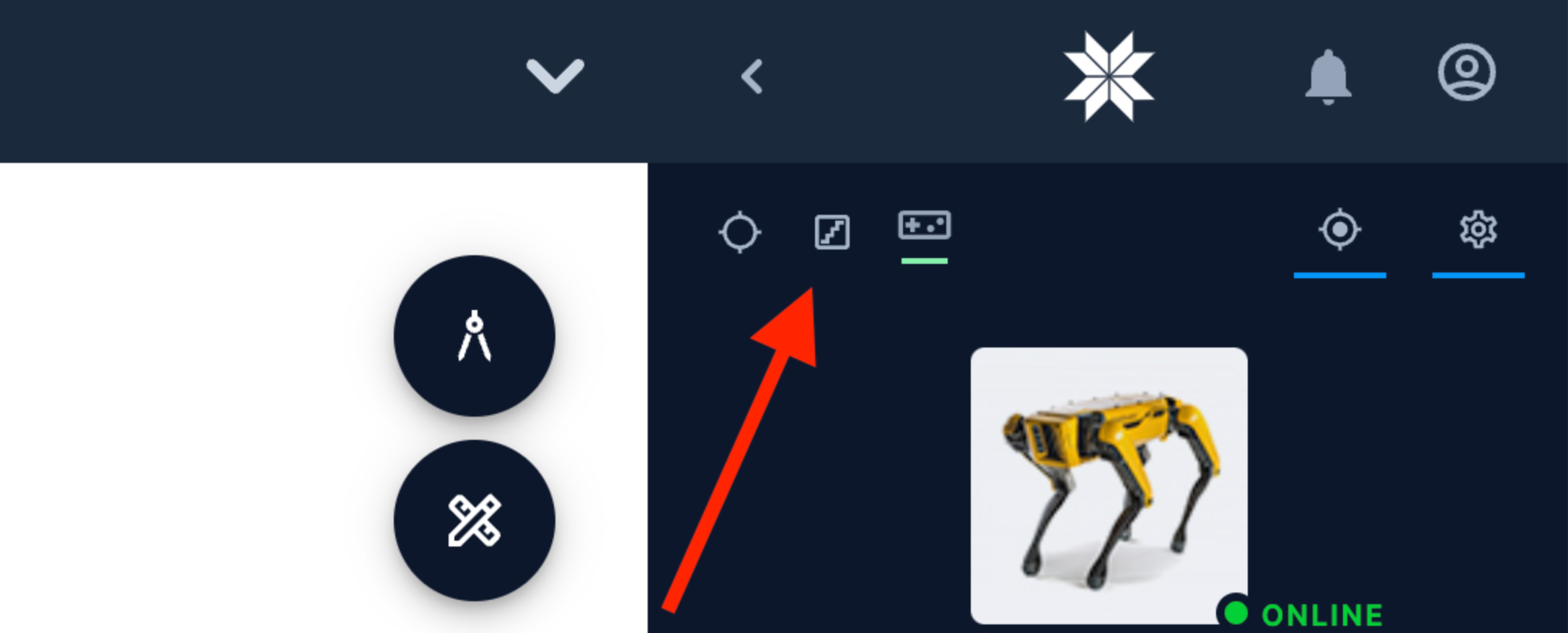
Showing the stairs mode icon for Spot (or other robots that have a special locomotion mode)
Usability improvements
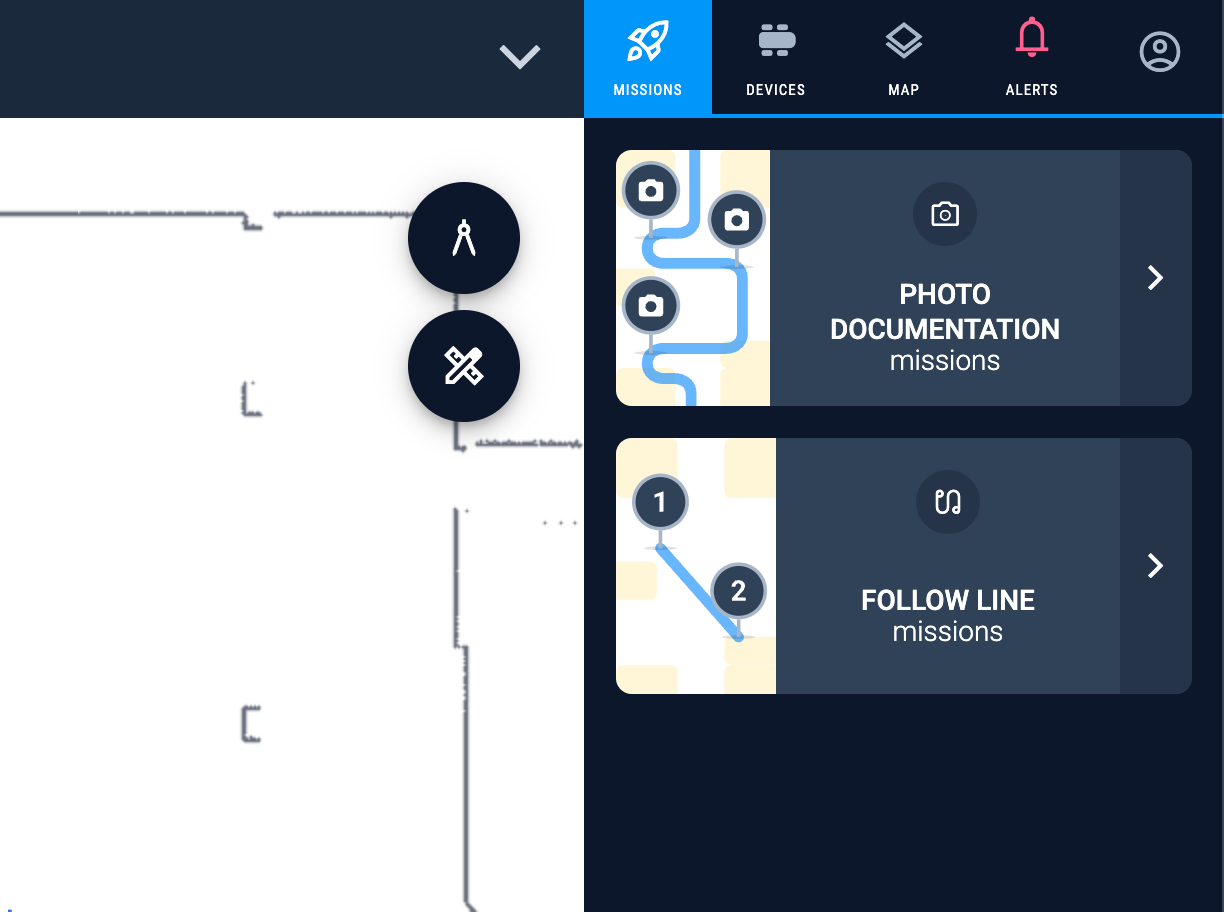
New tabs menu
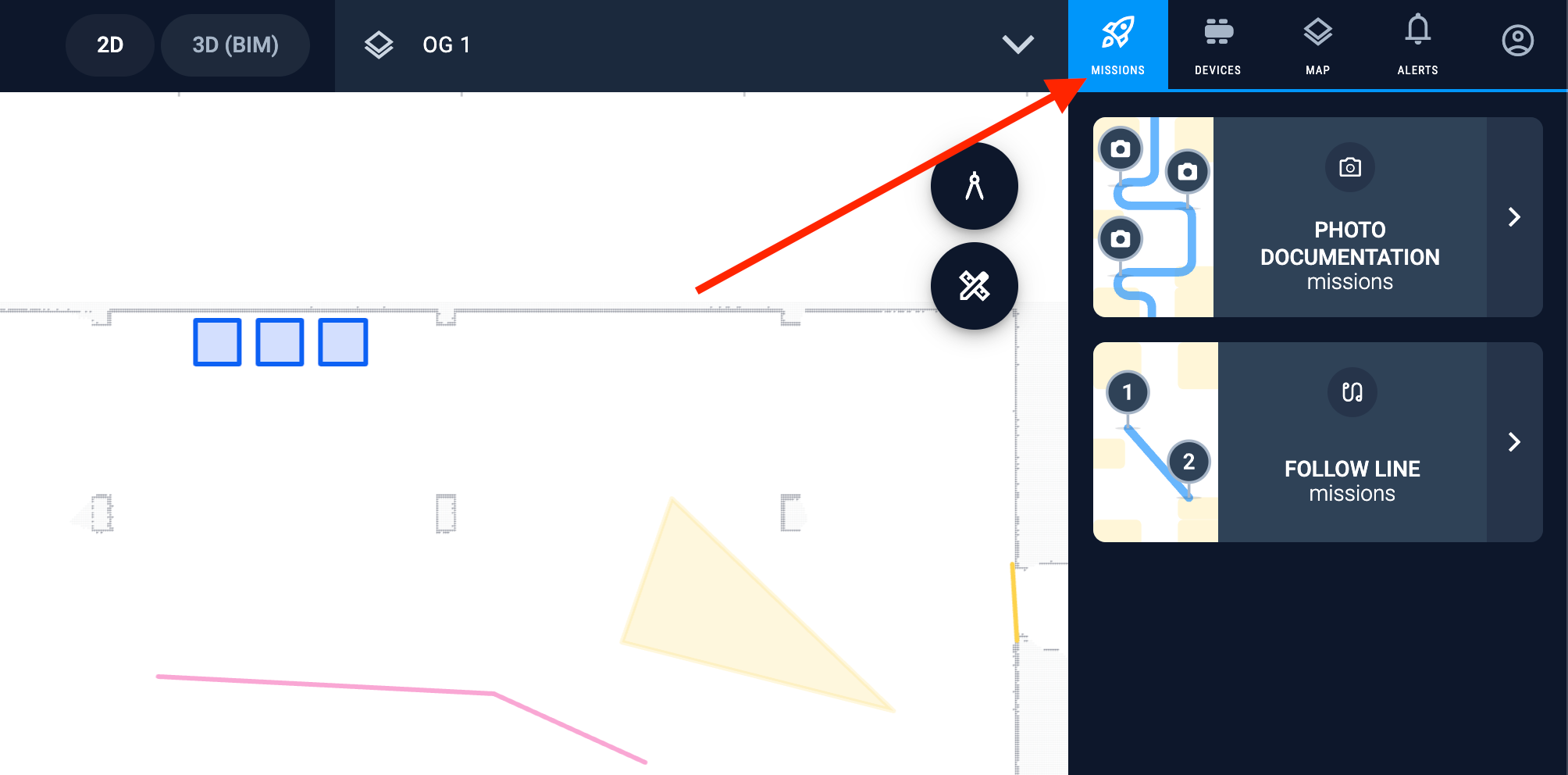
New rethought from scratch tabs menu helps to reduce amount of clicks user has to do. Missions area is split into possible missions. Current map menu went into a separate area.
New mission sidebar
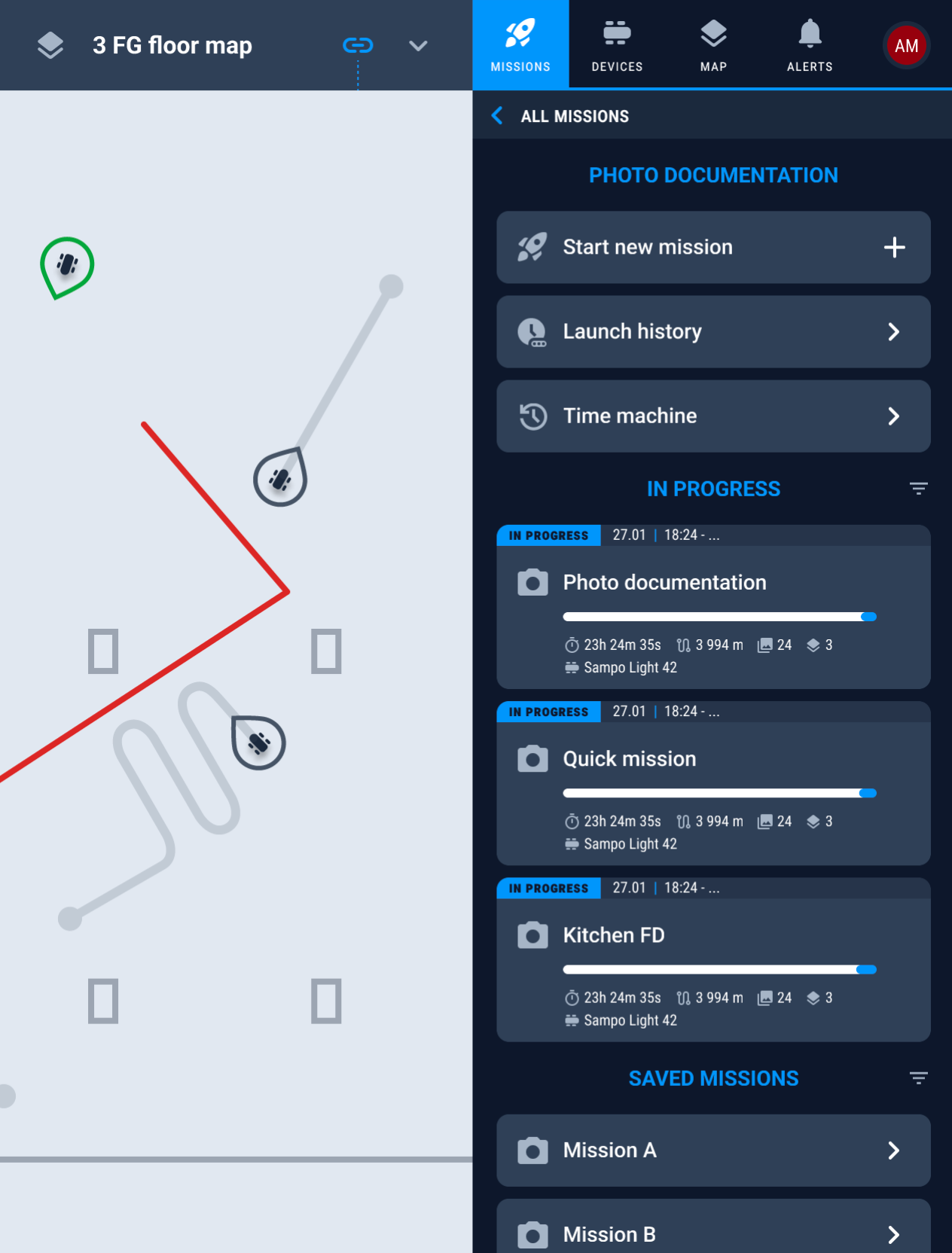
It shows the currently running executions, and saved missions. Also we have simplified the way of creation of new mission or launching of a new quick mission. This way helped to save a lot of clicks users had to do before.
Keeping device always on top
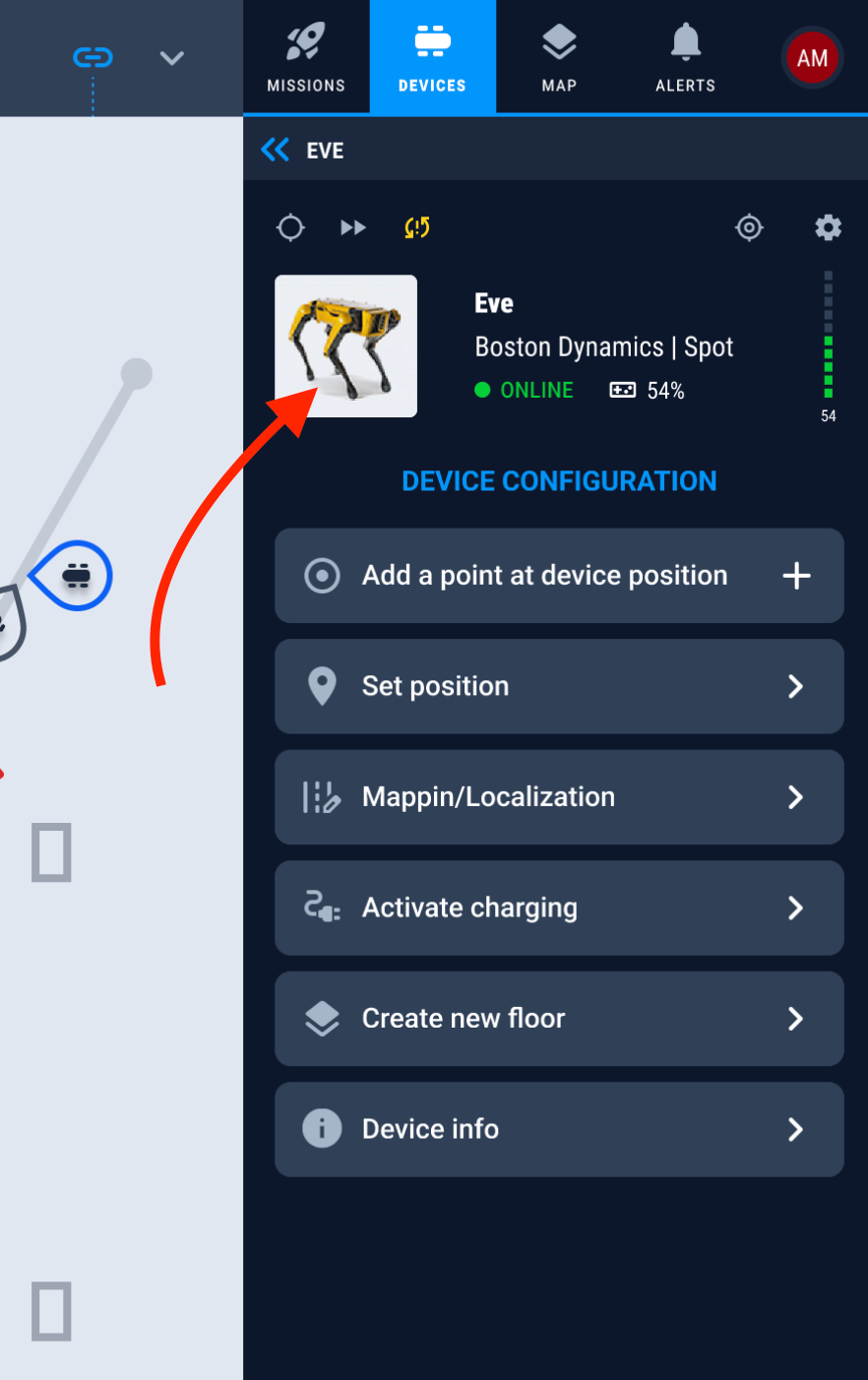
Now we keep selected device always on top. It helps to always see the most important information about device and its usage.
Redesign of mission creation
Made it more straightforward. Added animations showing what should user do. Reduced amount of clicks and confusions that were there before.
User management
Deactivate users
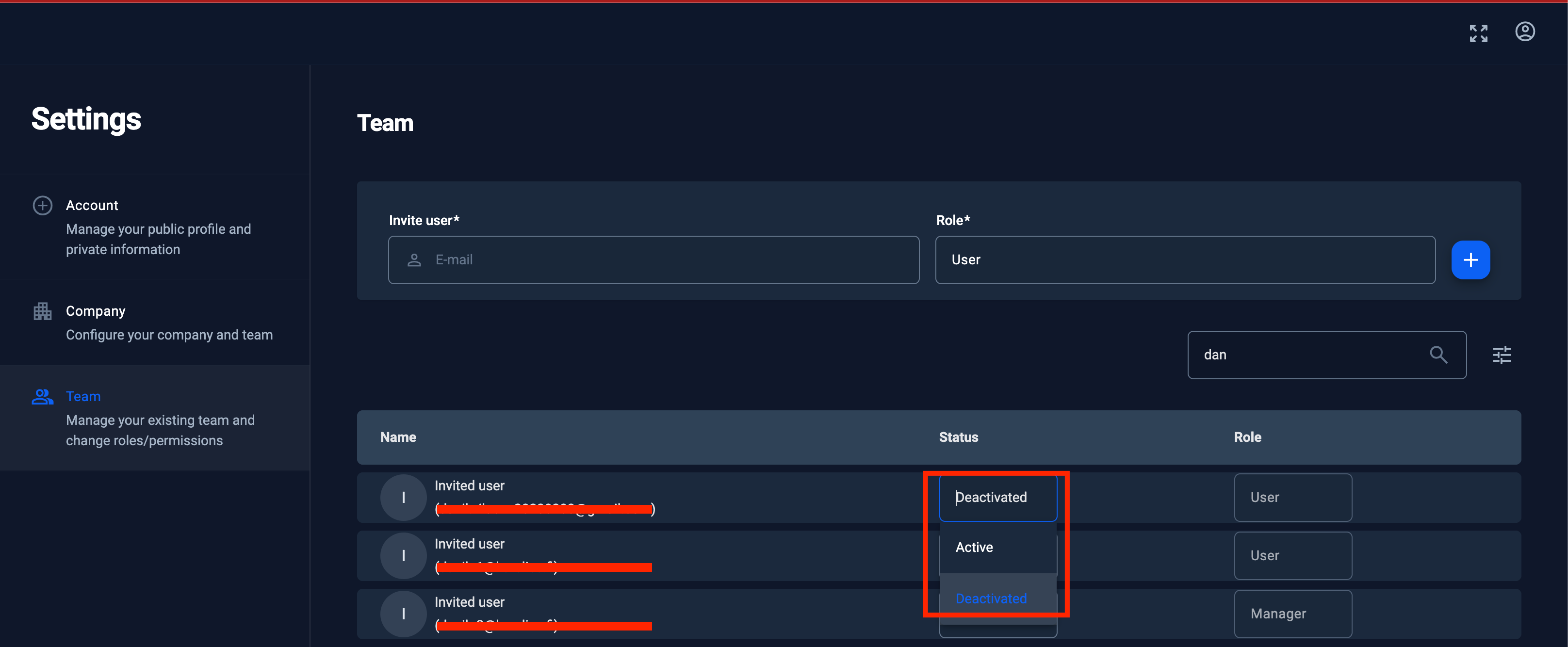
Added the possibility to deactivate the user.
Users filter
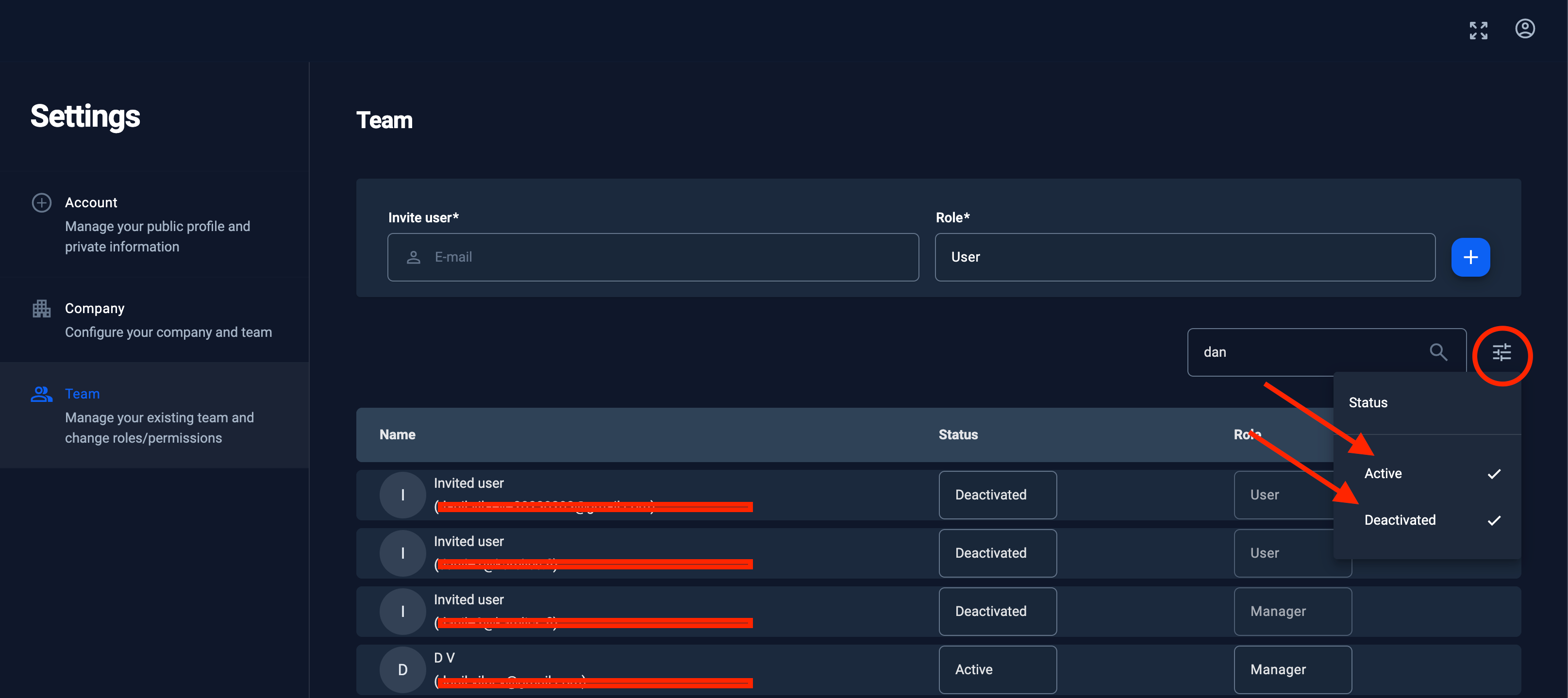
It is now possible to filter users by name/email.
By default deactivated users are not shown in the list. It is possible to filter them in or out.
Improvements for manufacturers and developers
Link to web RVIZ
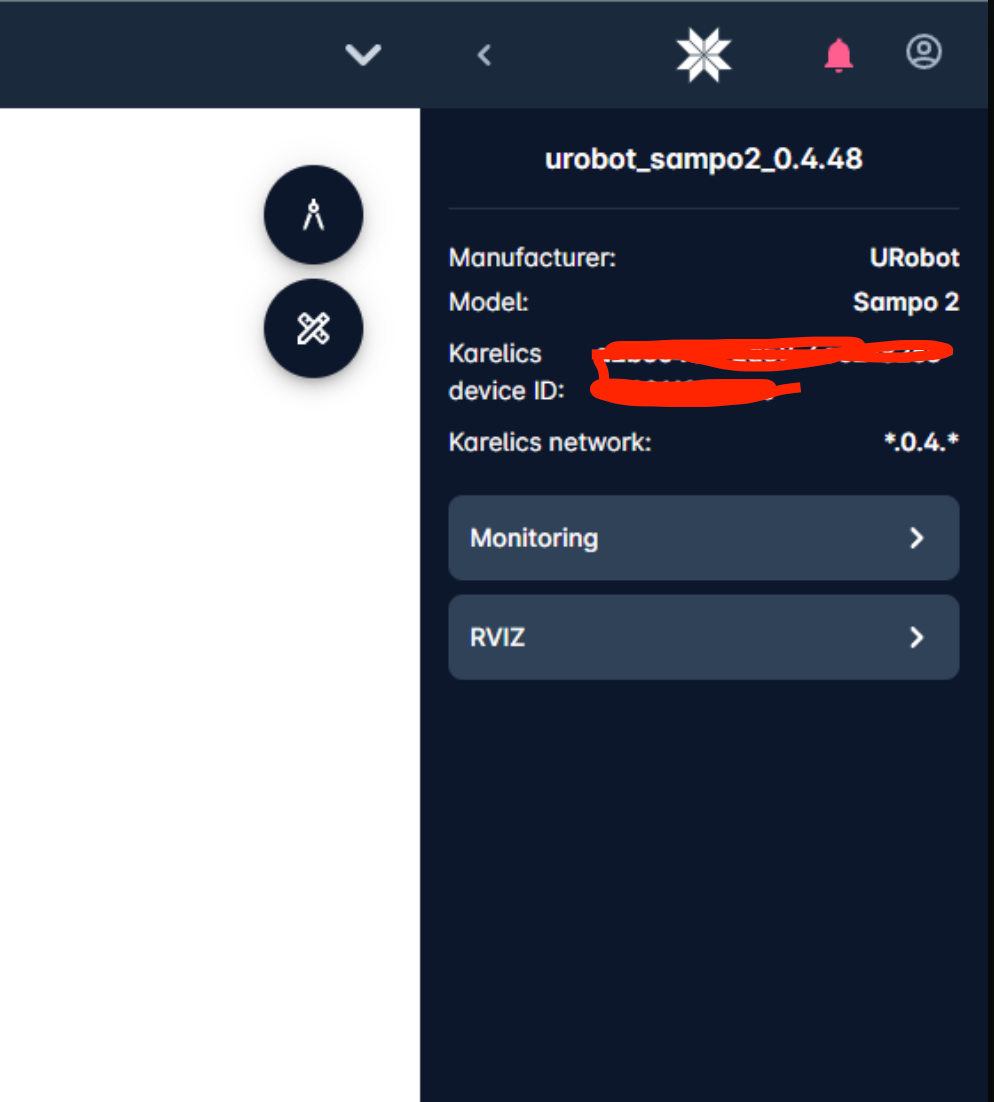
Now ROS developers may access the RVIZ that is running on the device. It will be opened in a separate tab and available only for developers and only within properly configured vpn network and only when developer has access to that device – special permissions need to be setup.
Debug mode (only for manufacturers or developers)
Automatic recording of rosbag files for each mission.
Important! Feature available only for users with device manufacturer or developer permissions.
In new Debug mode device will automatically start recording of rosbag files for each mission. If mission contains separate tasks – then we will generate rosbag files for each of them. Rosbag files are stored on device and available as attachments for mission execution or task execution. User can download it from cloud UI – no more need to connect directly to the device to get the rosbag files. Rosbag files will be available for exact timing of mission execution, no longer or shorter – this gives you the results without any unnecessary data.
Button to activate/deactivate the debug mode
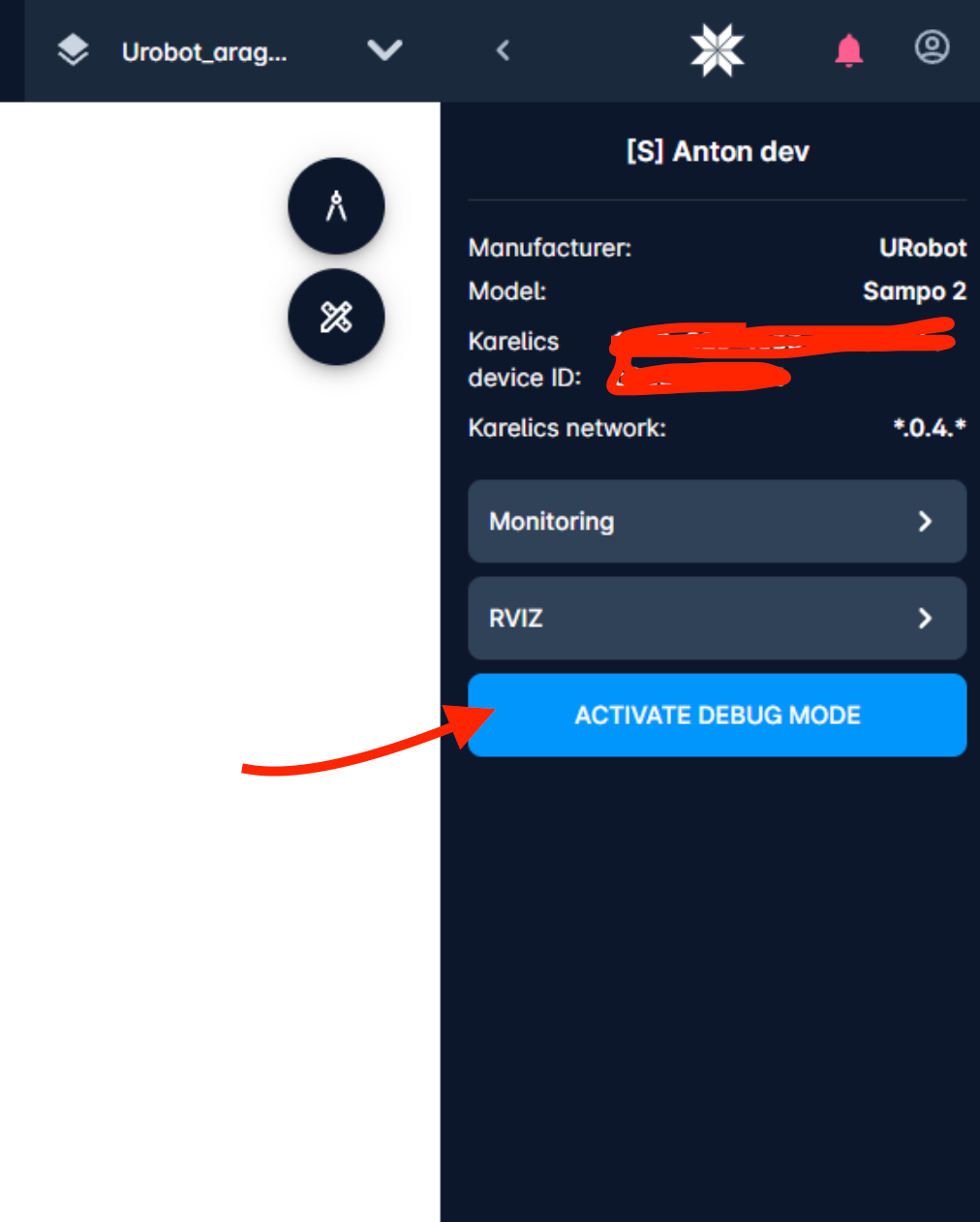
Users now can activate or deactivate the debug mode for device in device info sidebar.
When debug mode is ON – device will show a special icon in it’s status-icon-bar.
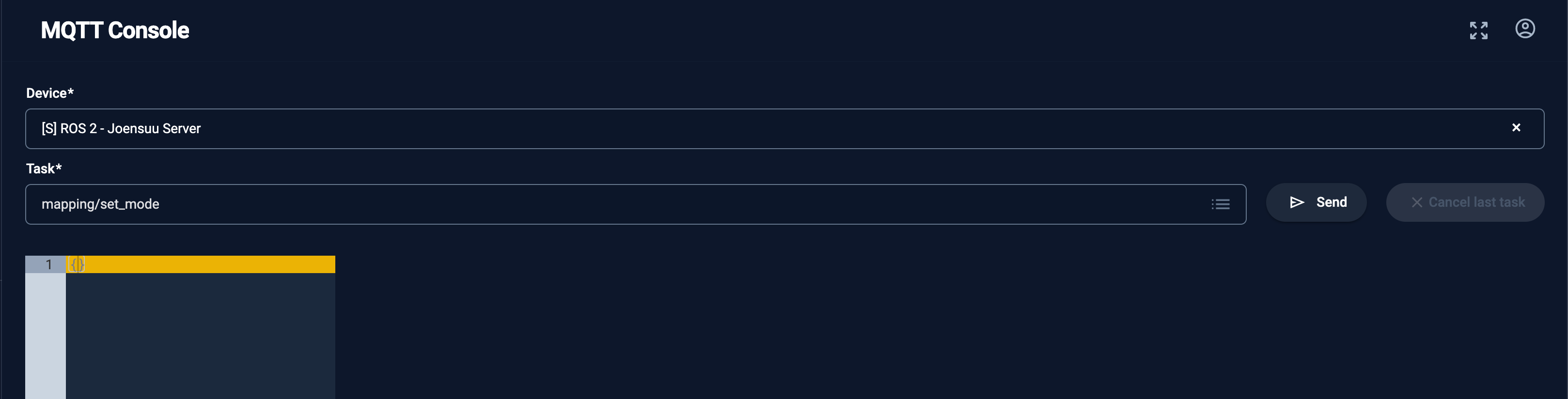
Improved MQTT console
Other improvements
- When open the map for the first time, now we fit to the map instead of showing the 0,0 point
- Now we store the last user position on the map. When switching between the maps it will restore the lasst used position. Waaay less zooming in/out and maps move needed.
- Last used project is now stored across all user devices.
- Projects in operator UI now sorted by date. New projects will appear on top.
- New file-binary service. Service provides secure and scalable way of storing the binaries and organising previews and necessary conversions. Can be used by extension developers.
- Mission task results can have now attachments. Each attachment will be processed asynchronously using new file-binary service. This helps to reduce the network load where needed and adding stability in data transfer. Tasks developers may now include rosbag-files to the task execution response for debugging reasons and easily download them from cloud UI.
- New API to upload an attachment to mission execution step. Useful in integration with other systems.
- Added the possibility to suggest the available ip address for new registered mini-cloud.
- Added missions sync to mini-cloud
Performance improvements
- When rotating device with controller it’s position on the map was updated with visibly long delay
- Sometimes getting devices list took visibly long time. Now it is happening way faster
Security and safety improvements
- For safety reasons – creation of navigation points or areas on the stairs or slopes maps is not possible anymore
- Added the possibility to deactivate the user
- Added more granular permissions check for new roles
- Other security improvements
Stability improvements
- Improved usability on touch devices
- Made photos sync during mission execution more stable
- Photos from photo mission support attachments property of task response
- Newly registered device was not shown as online in mini-cloud
- Some stability improvements for maps sync between devices
- In very rare cases SPOT left in charging mode although it was not charging
- If device was restarted while mission was in execution – we didn’t clear it
- Manual change of date of project by typing was not possible
- Better user-friendly description of certain errors
- Better contrast of the walls when zoom in and out
- Reduced the amount of data transfer for images, making it more user friendly on slow 3G
- Added a message for users with disabled WebGL on how to activate it for viewing the 360-photos
Bugfixes
- Chosen on registration user locale was not applied after entering the app
- In some rare cases downloaded original 360 photo did not have EXIF metadata
- User could not create map with same name as recently deleted map
