Welcome to the Karelics Cloud release notes! In this document, we will share updates and changes to Karelics Cloud that have been made in the current release. These updates include new features, improvements to existing features, and bug fixes. We encourage you to review the release notes carefully to stay informed about what’s new in Karelics Cloud and how these updates may affect your use of the platform. If you have any questions or need more information, please don’t hesitate to reach out to our support team. Thank you for using Karelics Cloud!
Release 2023.28
Table of Contents
Mission management
Status of mission execution step
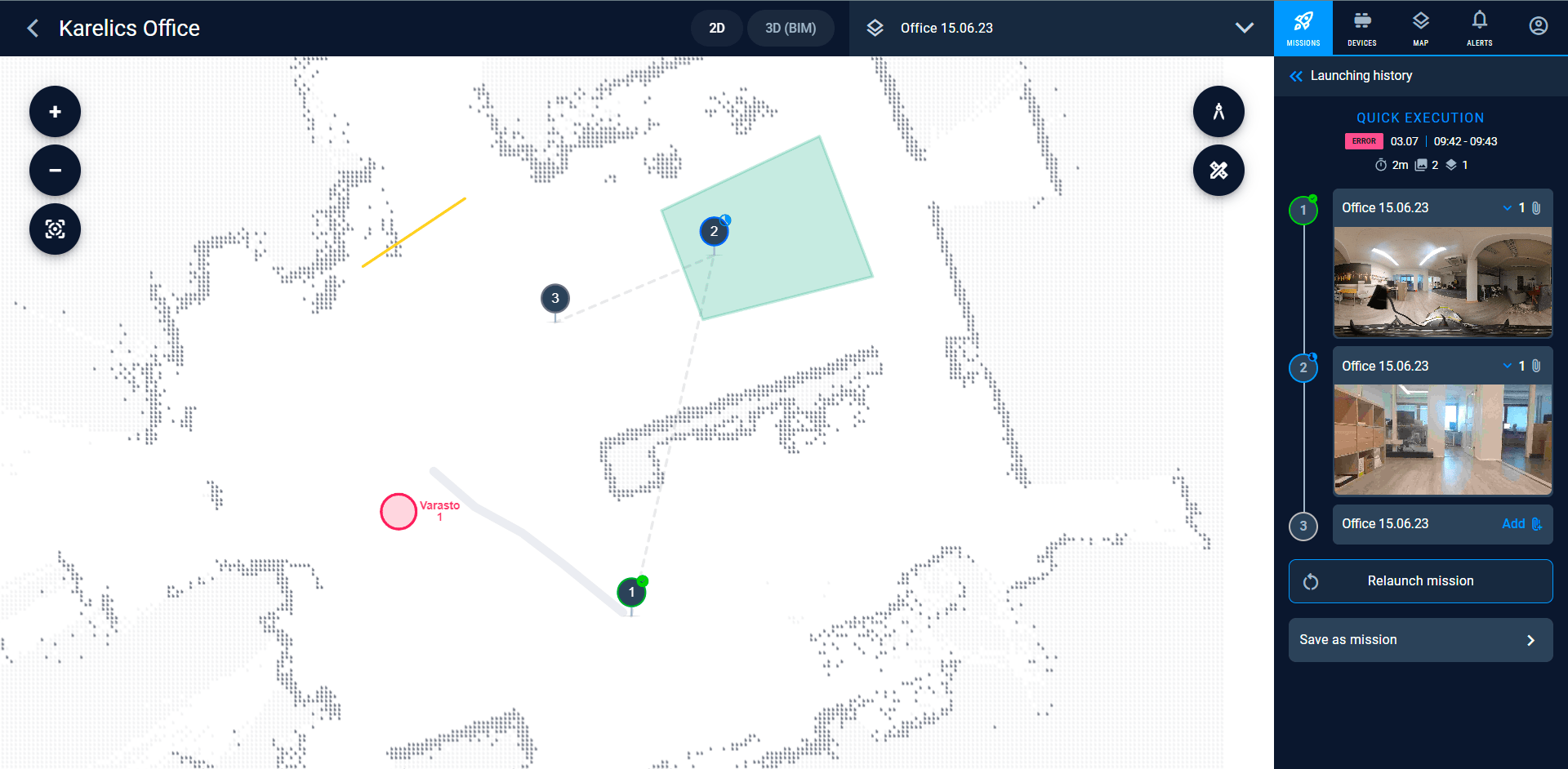
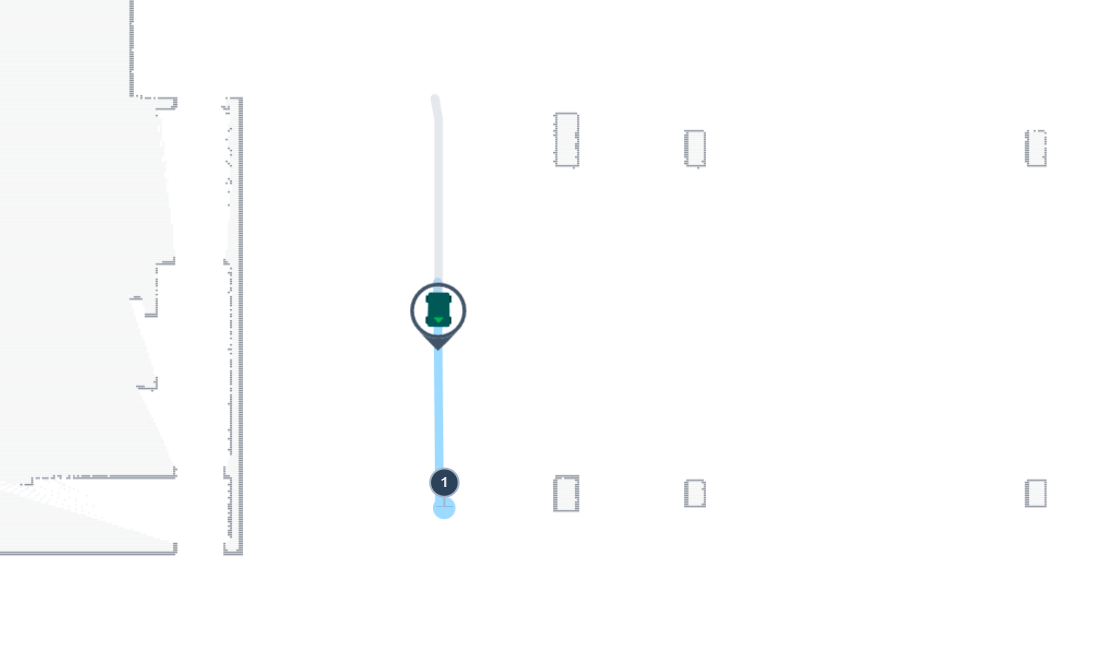
Thanks to the feedback from our construction site users we have added the possibility to track the execution of the mission steps in real time. We highlight the currently executed mission step as well as the successfully executed previous steps.
Showing the path robot did during mission execution
Now we are showing the path while the robot is moving to the next step of the mission and the path it took before. This is especially useful when the robot can start from a different place or needs to return to the initial position. This helps the construction site managers understand how their robot was moving, for example, when some floor coating or inspection work had been executed on a construction site.
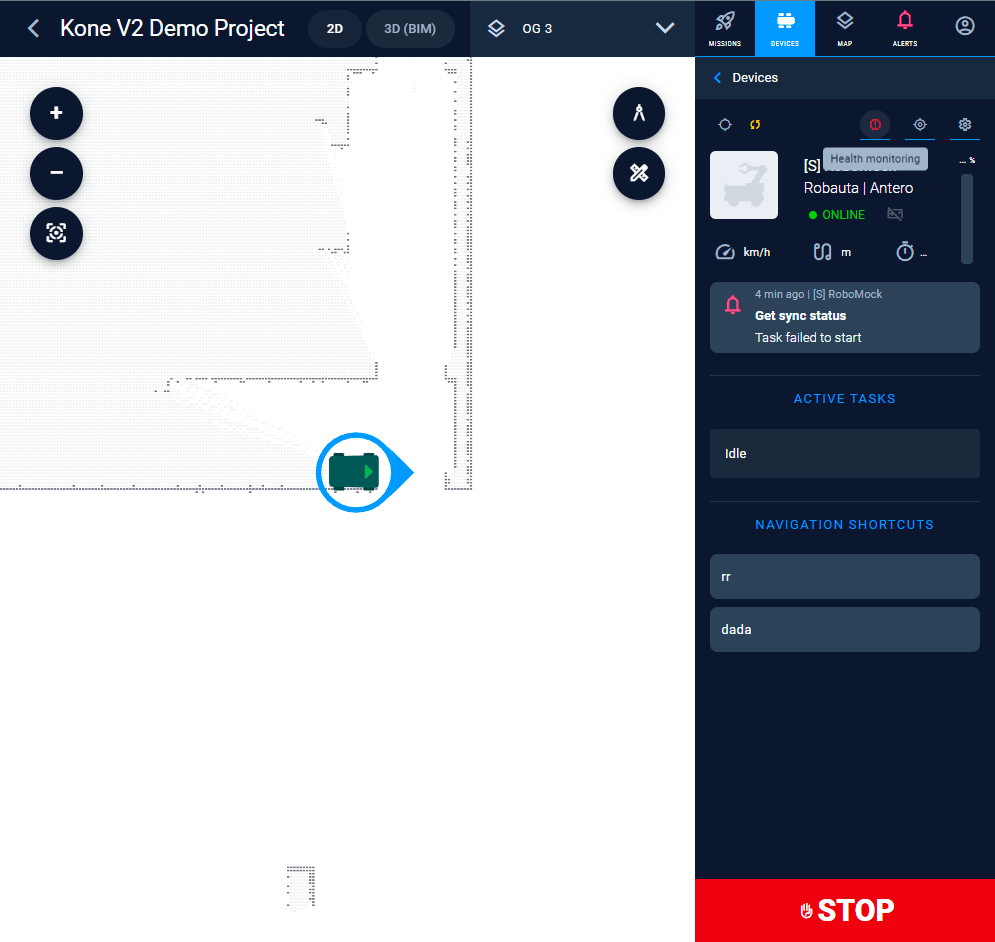
Extended the sidebar with information about mission execution metrics and device
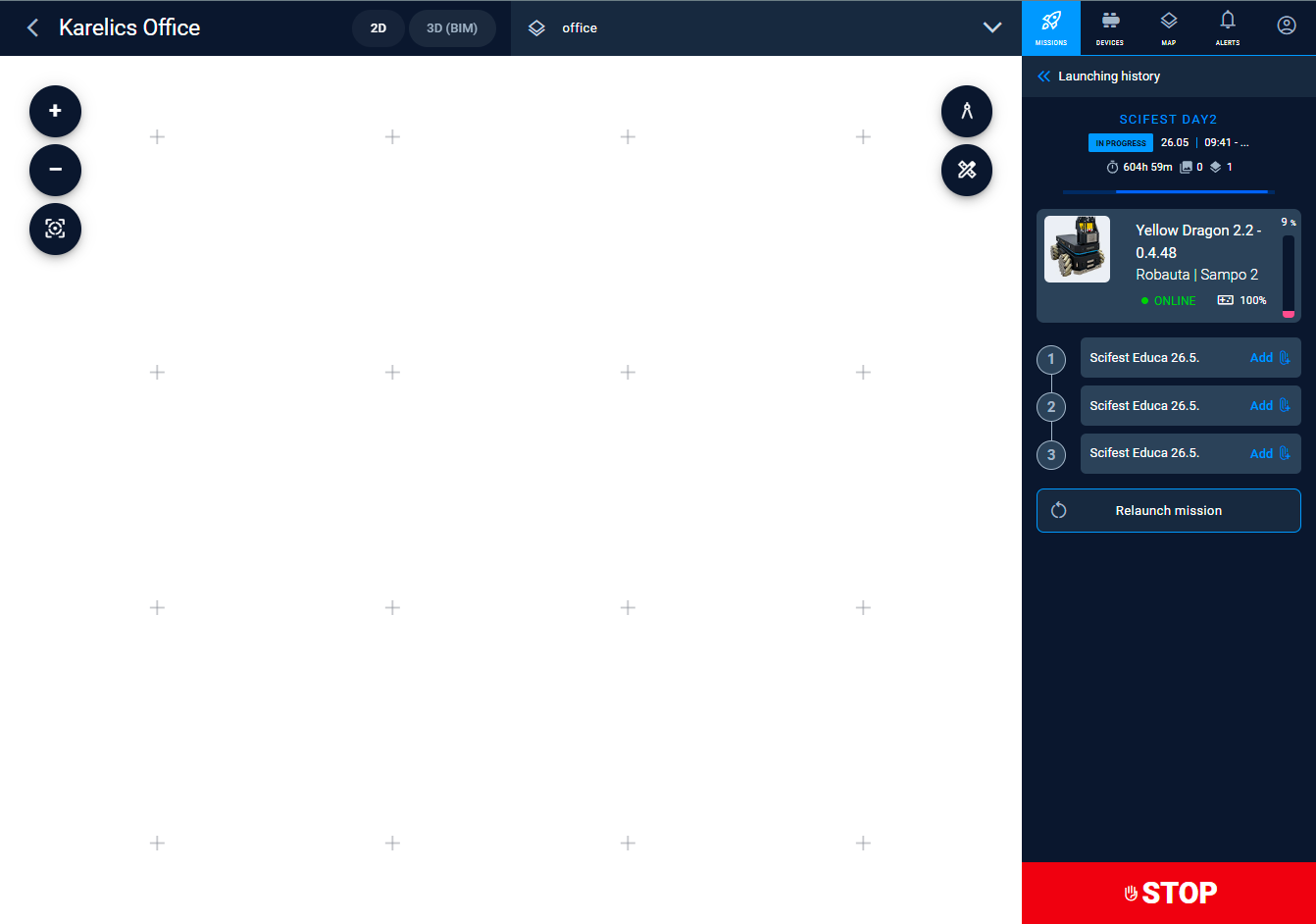
Now construction sites using missions can clearly understand which construction robot is doing the work. Clicking on a device will directly lead to the device page, reducing the required clicks to reach that view.
Safety during the operation of the robots on construction sites is highly important. While watching a device execute certain work, it is now possible to quickly stop it by clicking the red STOP button from the mission execution.
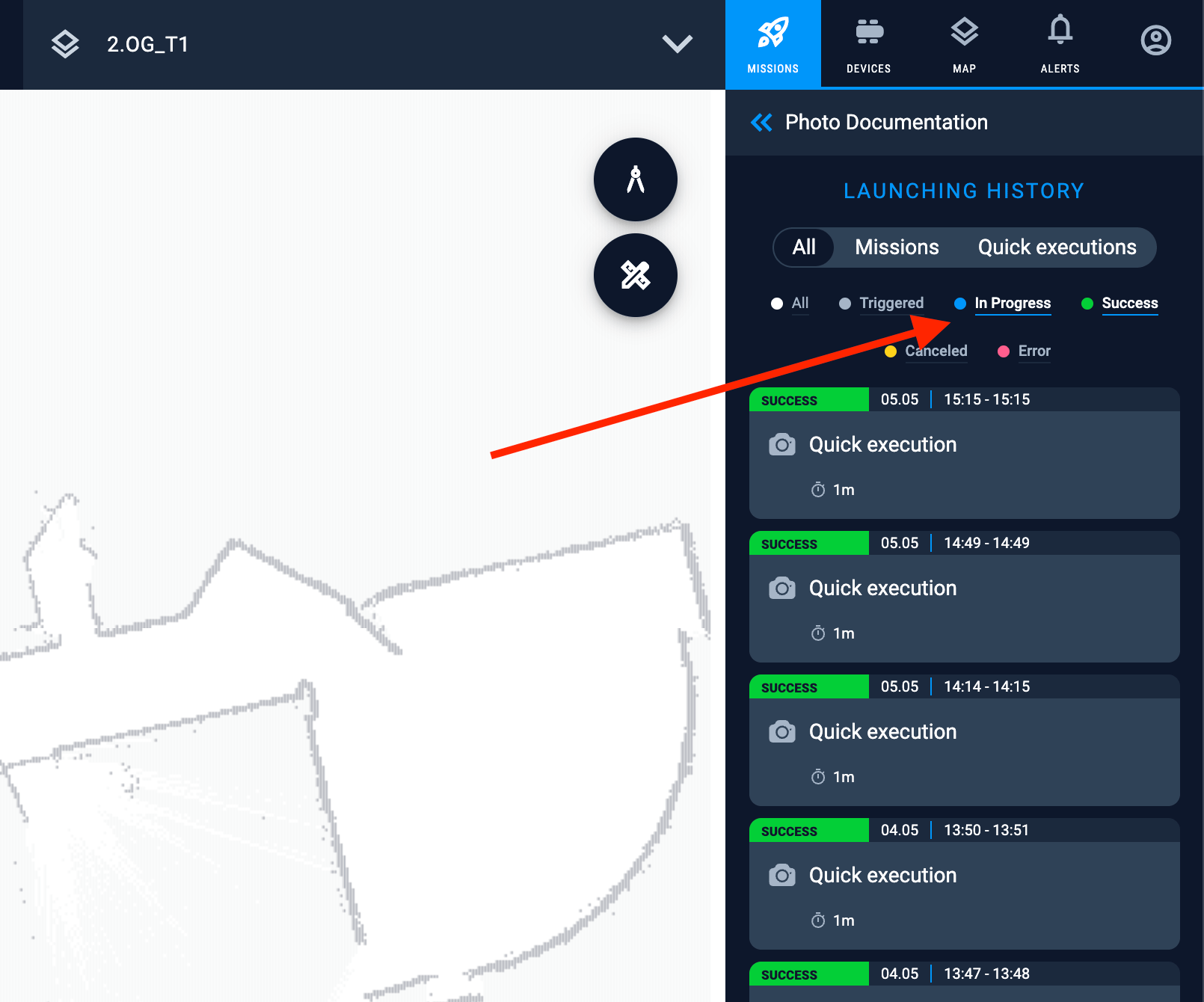
Filter for mission executions
Now workers can select multiple states they are interested in. The selection is stored for a user. With fewer clicks construction site workers save their time for important work.
Other improvements for missions management
Now the second click at the step point on the map will remove it
Improved the texts and animations to make the system more clear for construction site workers
When execution is opened – user will be switched to the map of that execution automatically to see the results right away
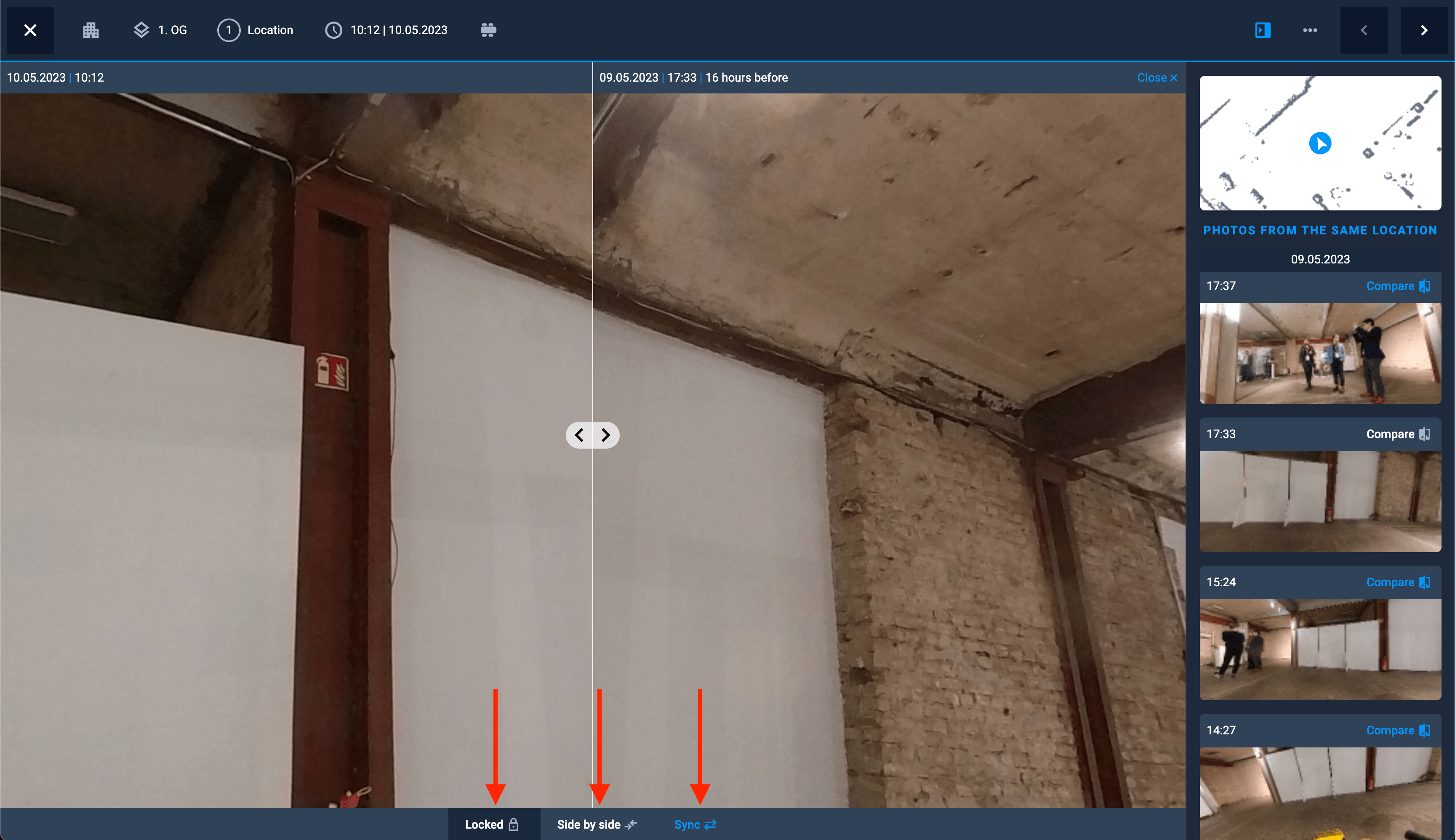
Sometimes construction site managers need to compare how did some part of the construction site look before and how does it look now. In our construction photo documentation preview we show in the right sidebar the photos from the same location. In previous release we have added the possibilities:
to lock the view: in this mode when one 360 photo will be rotated to the left or right – the other one will rotate accordingly too. If this mode is deactivated – you can move only one photo at a time
side-by-side view. If activated – we will show both photos of construction site near each other, but looking at the same place. If not activated – photos will be like one behind another and the drag’n’drop arrows in the middle will allow to see more of one photo or of another. This is especially useful when comparing the results and when photo was taken from the same location. Taking a photo from the same position is a strong side of our construction robots fleet management solution
sync button will target the right photo to the same point of view as the left photo. Since the photo of construction progress was done by robots we always know where it was located and where it was directed.
All these functionalities are essential for any construction site inspection routine.
Working with maps
Maps rotation
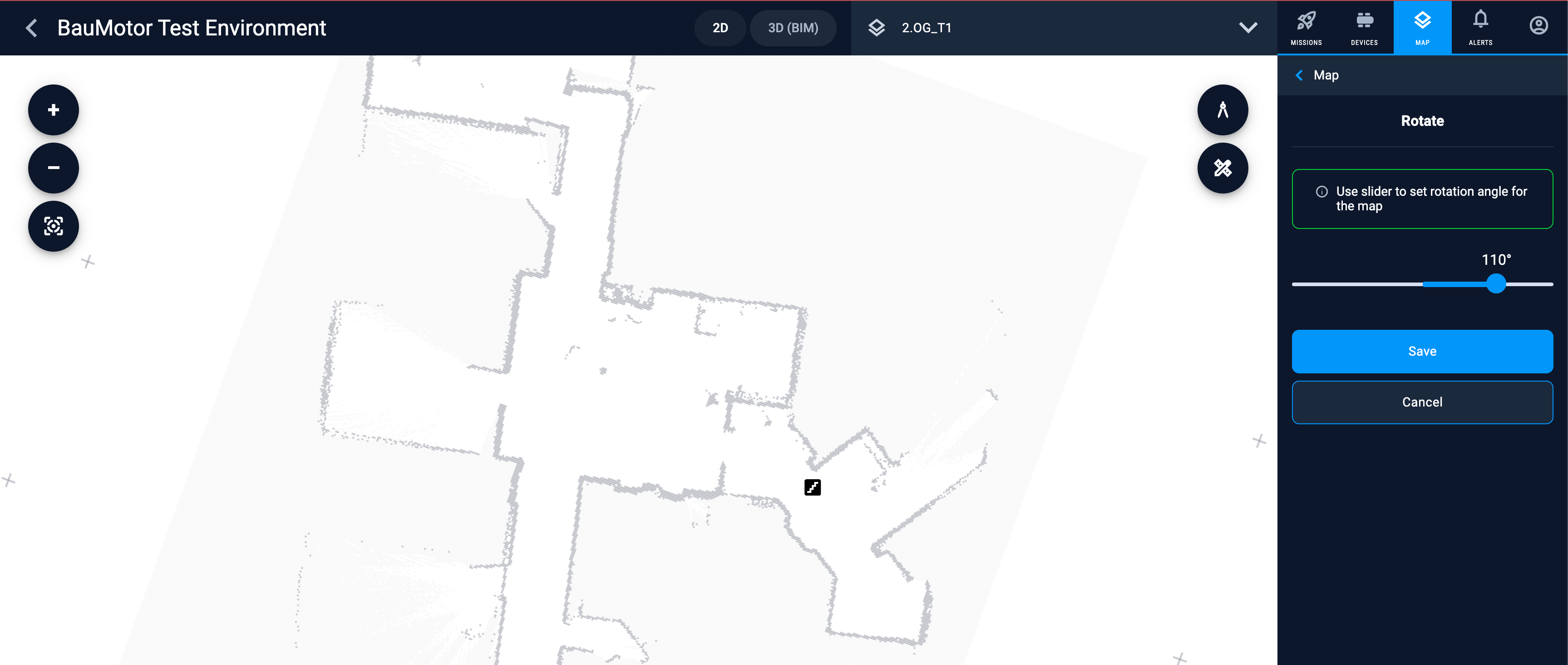
Construction site workers are used to see the floor plan in one orientation. However, when started mapping device might have any random initial orientation. Now we added the possibility to rotate the map to achieve the most similarity with the floor plan of the construction site.
The map will be rotated with all points of interest. It will be shown rotated on the mini map in the 360 photo preview window too.
Calculation of coordinates and orientation for all points of interest is done on the fly. Robot developers don’t need to correct anything in their code.
We have updated our forks for opensource packages Path.Transform and Path.Drag since they didn’t support rotation before.
Maps synchronisation
We have improved the maps synchronisation when construction robot uses its own maps format under the hood. At the same time this change has made our multi floor navigation more stable opening more possibilities for construction workers in operating devices like Spot from Boston dynamics with Karelics payload.
Project management
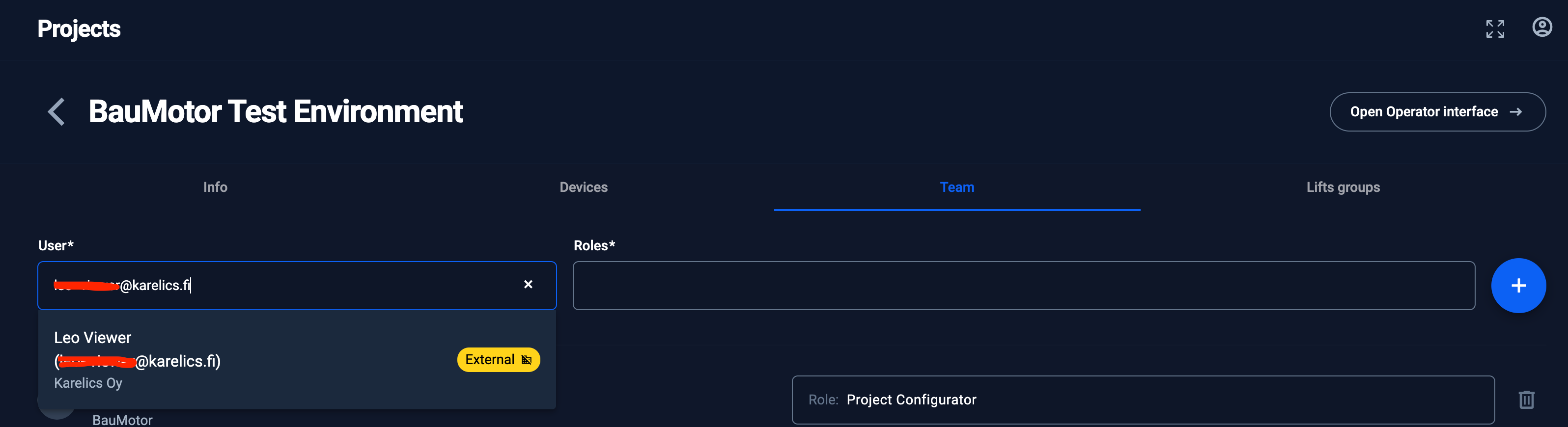
Improved users search in a project and highlighting external users
Now when a user is invited to a project, we show only enabled users and those who were not added to a project in the dropdown. When a construction site worker needs to add another user to his project, it will show the label “External” if the user is not from the worker’s company. Current limitation: for inviting an external user – this user should already exist in the system and will be found only by searching with the full e-mail address.
Robots fleet management improvements
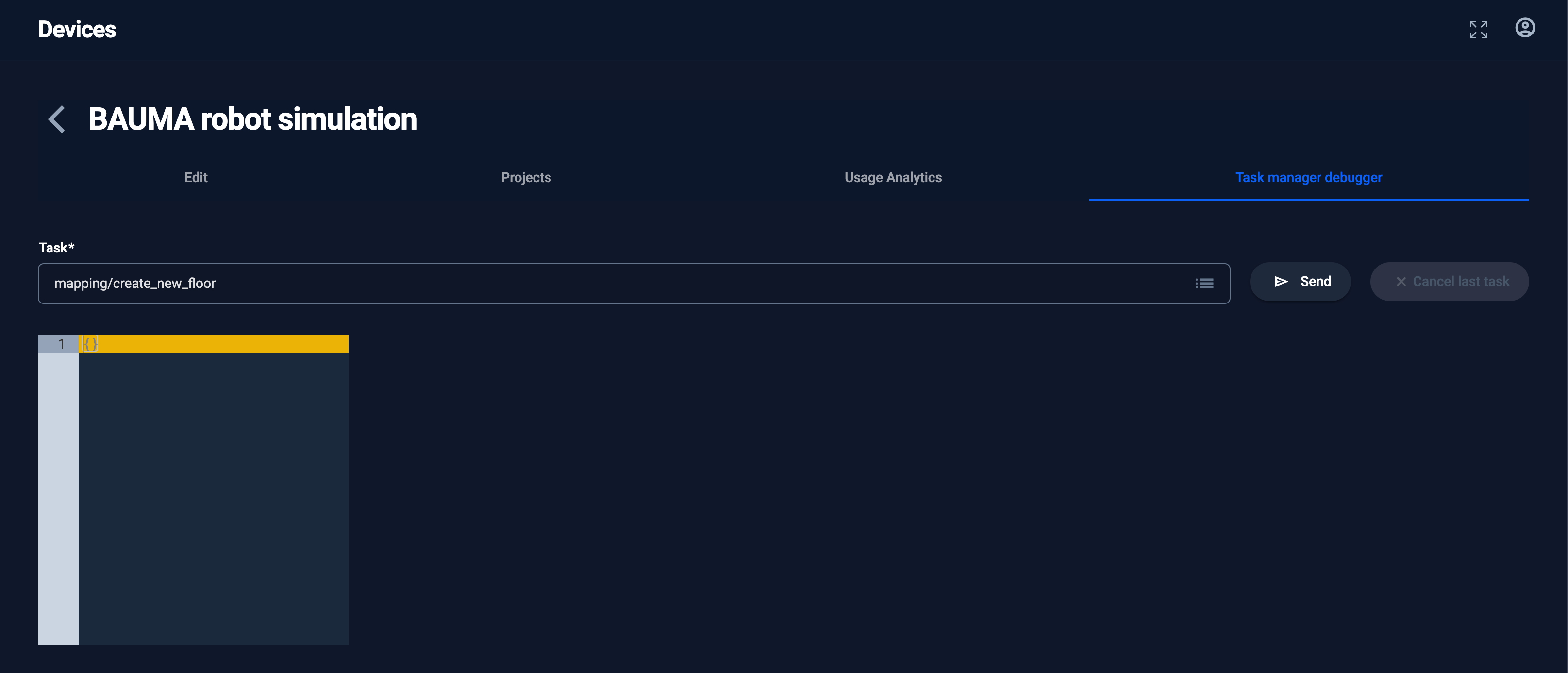
The Task manager debugger
The former MQTT console has been moved to the “Task manager debugger” tab under the device configuration interface. Here it is possible to execute any built-in and custom tasks. The execution steps will be shown accordingly without refreshing the page. Now construction robot manufacturers can debug tasks performed by their devices without connecting directly to the robot.
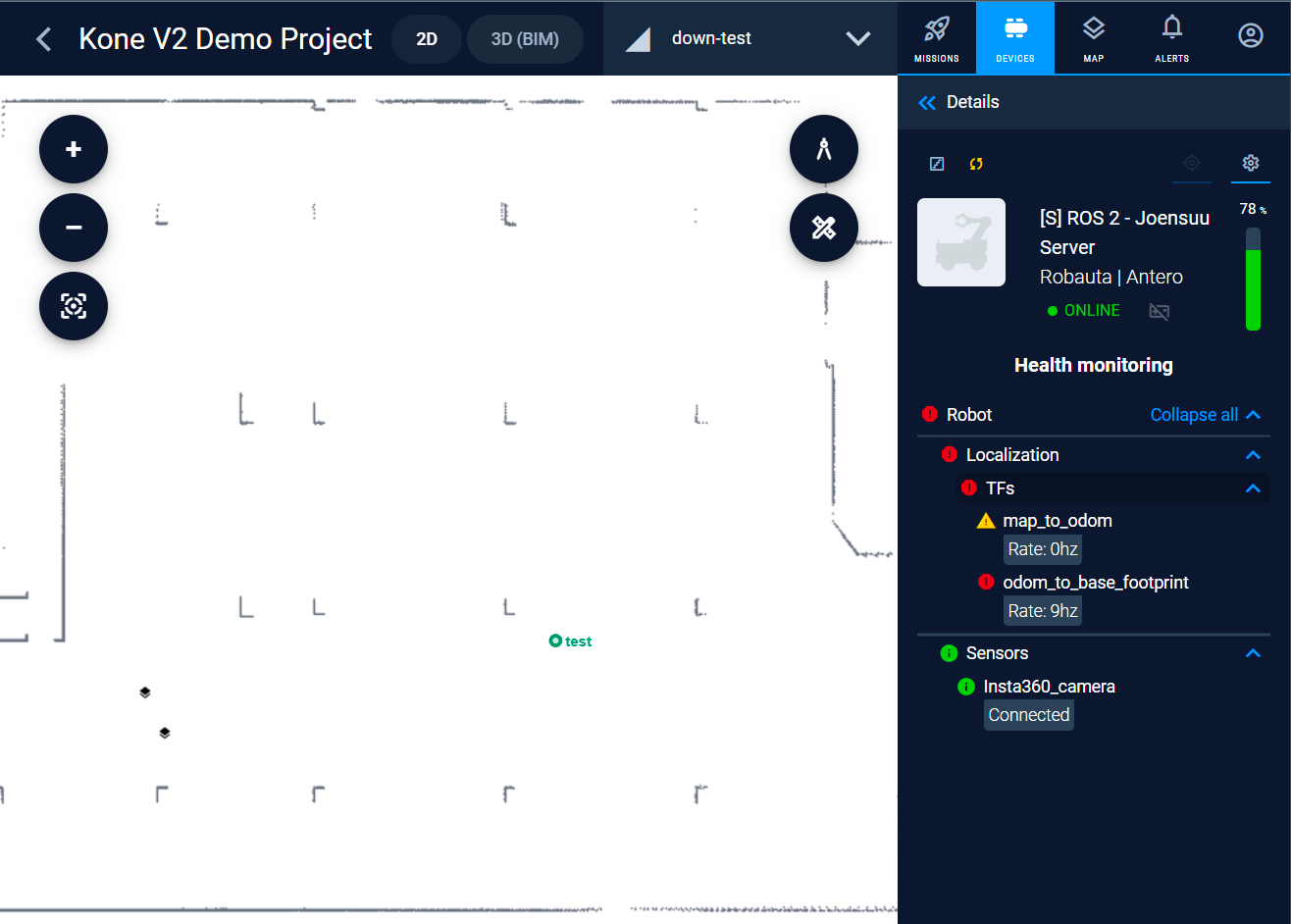
Robot ROS health monitoring
This time we release our first version of robot Health monitoring UI. Accessible by robot manufacturers and built for ROS2 (not only), it shows the current status of the ROS nodes making it easier to understand why something doesn’t work. Once the severity of any topic is turning to Warning or Error – the special symbol will be shown for a user allowing quick access to the current status. Alternatively users can access it from “device info” sidebar.
Other improvements
Usability improvements
Added more intuitive feedback messages to a user in some cases making it clear what needs to be done
Saw how construction workers sometimes got confused when worked with our robot fleet management. Fixed some navigation routes, making it easier to understand
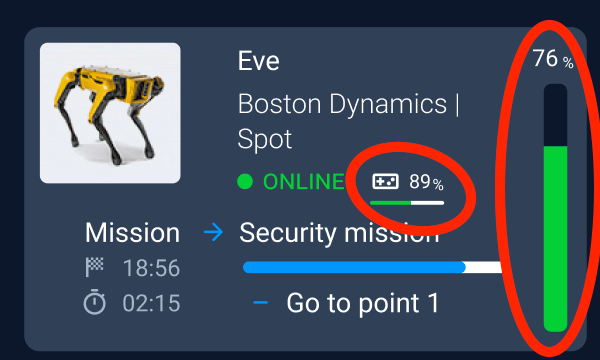
A new battery indicator. Earlier we have realised how unintuitive it was to see small numbers of the current battery charging status of a construction robot. Now we made it more clear again
Improved wording in Finnish. Thanks for the feedback
Stability improvements
Slightly improved the permissions distribution schema. Now it is more clear what can a viewer of your project do and what an operator
Mission points were not shown when navigating from an empty map
Quick execute for follow line mission didn’t set direction
Fixed device search when plan it to a project which has already a planned end date
Better offline mode handling
Improved hanging tasks and missions handling
Improved the device handling when device is planned for the same day in different projects
Reduced our bundle size 3 times, reducing the initial load of our robotic fleet management system
Photo preview bottom sidebar is now visible on iPads