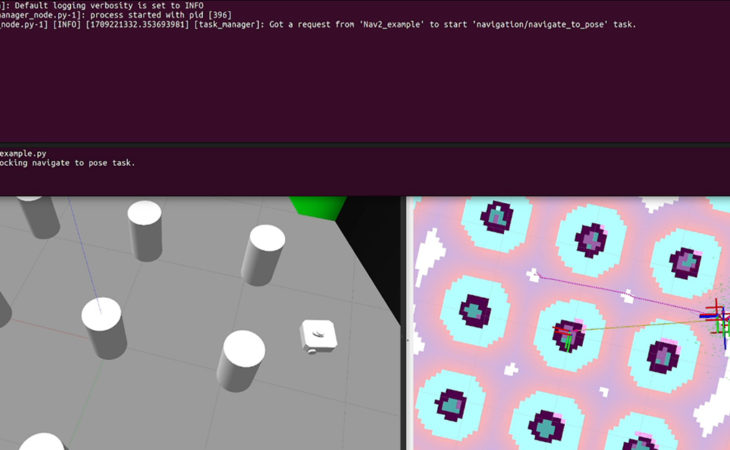
Open sourcing ROS 2 Task Manager package
We are proud to announce the open-sourcing of our Task Manager ROS 2 package, a centralized solution designed to initiate, monitor, and manage tasks on
We are proud to announce the open-sourcing of our Task Manager ROS 2 package, a centralized solution designed to initiate, monitor, and manage tasks on

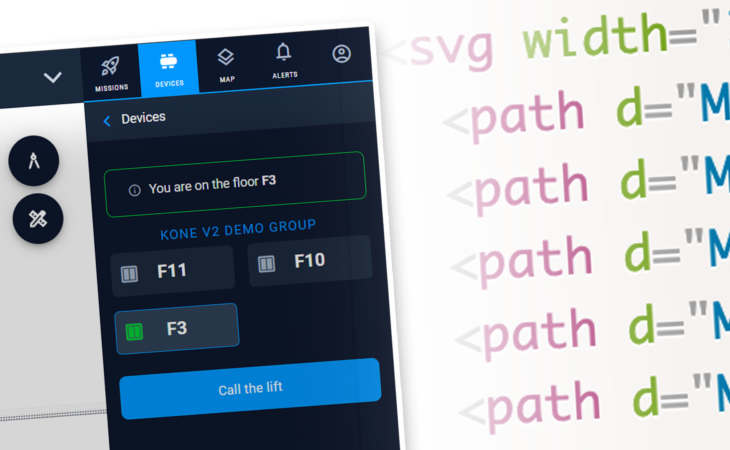
A DevOps engineer needed to pass environment variables to the container with the frontend to apply without rebuilding the container again. Angular does not provide
Introduction In today’s fast-paced world, efficient and accurate documentation is essential for various industries, from construction and real estate to the mining and energy sector.

When integrating a new robot with our Karelics Brain, we sometimes wish to equip it with our own Karelics payload to provide extra sensors and/or

In the Karelics Cloud, we use Keycloak as the identity management tool. Keycloak provides many customization options, but we have a scenario where the out-of-the-box

A few months back, the Karelics team embarked on the perilous journey of migrating from ROS 2 Galactic to the latest LTS distribution, Humble. Galactic
In our platform, Karelics Cloud, we strive to automate repetitive tasks and improve interactions with robots through our robotic fleet management capabilities. As part of

Let me guess – you snap a photo of an issue on your jobsite and send it to your platform, and you do it again
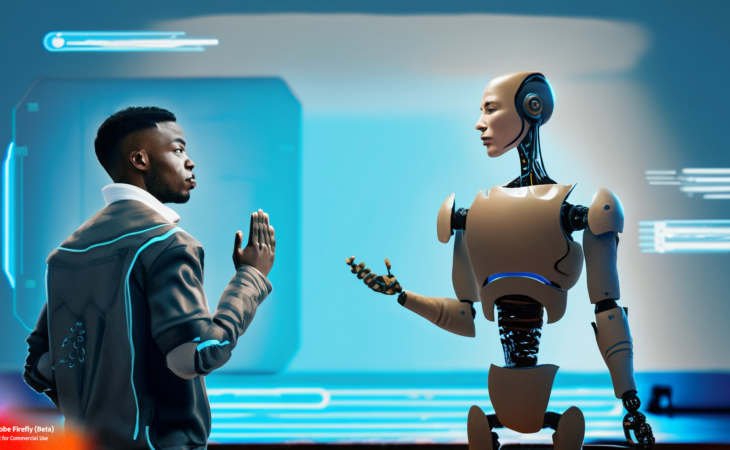
Unleash the Power of Language Models in Robotics! Language models like ChatGPT are the game-changer we’ve been waiting for. With these remarkable creations, communicating with
xAfter years of experience of working with ROS and robotics, we’ve seen a fair share of weird and surprising bugs and issues. I wanted to
