Hey there, tech enthusiasts and curious minds! Are you ready to embark on an exhilarating journey into the world of robotics, where language models and cutting-edge technology collide to create a future full of endless possibilities?
Picture this: you’re standing in your living room, when you suddenly have a brilliant idea. You want your trusty robot companion to do something extraordinary, something beyond its preprogrammed capabilities. In the past, you’d need to dig into complex code and spend hours, maybe even days, programming your robot to perform even the simplest of tasks. But not anymore!
Enter the game-changer: language models like ChatGPT. These remarkable creations can revolutionize the way we interact with robots. Imagine being able to effortlessly communicate with your robot using natural language, giving it instructions and watching as it brings them to life, all without writing a single line of code yourself. Sounds like science fiction, right? Well, prepare to have your mind blown!
With the power of language models, users can ask their robot companions to perform tasks using plain, everyday language. It’s as simple as having a conversation with a friend! The language model then takes those instructions and translates them into code that the robot can understand and execute. Talk about breaking down barriers and making robotics accessible to everyone!
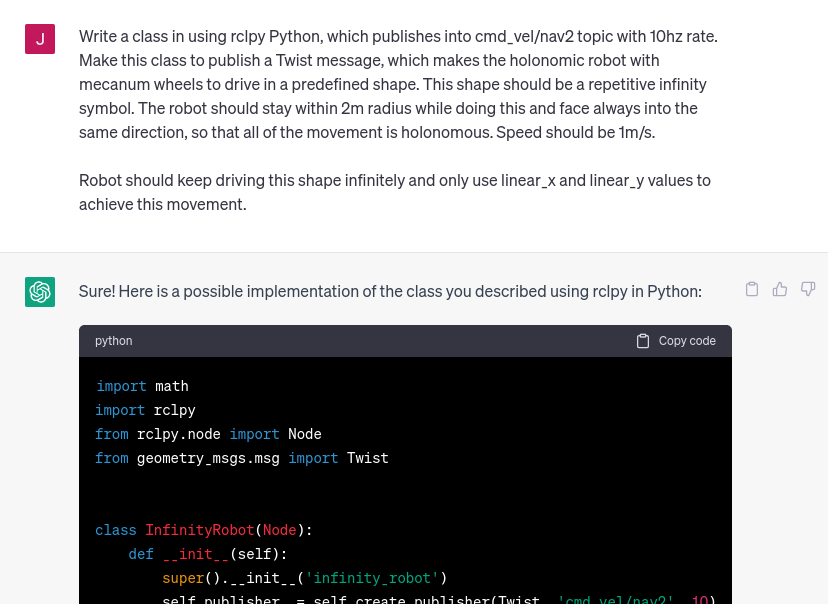
To truly grasp the marvels of this technology, let’s take a look at a mind-boggling example: a ROS Node created by ChatGPT to make a robot perform an infinity-sign pattern in the Gazebo simulation. Just watching the gif below will leave you awe-inspired! The seemingly magical combination of language models and robotics can bring even the wildest imaginations to life.
But hold on a moment. While the concept is undeniably mind-blowing, we must remember that the path to perfection is paved with challenges. Language models are remarkable, but they’re not infallible. As with any new technology, there are kinks to iron out and limitations to consider. Building robust and reliable systems that can understand the nuances of natural language and translate them into precise robot actions is an ongoing endeavor.
Nonetheless, we can’t help but feel a wave of excitement as we envision a future where language models seamlessly integrate with robotics, revolutionizing the way we interact with machines. From household chores to complex tasks, our robot companions could become intuitive, responsive partners in our daily lives.
So, my friends, let’s embrace this technological leap and welcome the era where language models and robots join forces to make our lives more exciting, efficient, and fun! The possibilities are limited only by our imagination.
Stay tuned and stay curious! Until next time, fellow enthusiasts, keep dreaming and exploring!
Note: The following blog post was written in collaboration with ChatGPT
import math
import rclpy
from rclpy.node import Node
from geometry_msgs.msg import Twist
class InfinityRobot(Node):
def __init__(self):
super().__init__('infinity_robot')
self.publisher_ = self.create_publisher(Twist, 'cmd_vel/nav2', 10)
self.timer_ = self.create_timer(0.1, self.timer_callback) # 10Hz
self.current_time_ = self.get_clock().now().to_msg()
self.speed_ = 1.0 # m/s
self.radius_ = 2.0 # m
self.direction_ = 0.0 # rad
def timer_callback(self):
twist = Twist()
twist.linear.x = math.sin(self.current_time_.sec + self.current_time_.nanosec * 1e-9) * self.radius_
twist.linear.y = math.sin(2 * (self.current_time_.sec + self.current_time_.nanosec * 1e-9)) * self.radius_ / 2
twist.angular.z = self.direction_
self.publisher_.publish(twist)
self.current_time_ = self.get_clock().now().to_msg()
def main(args=None):
rclpy.init(args=args)
node = InfinityRobot()
try:
rclpy.spin(node)
except KeyboardInterrupt:
pass
node.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main() 