Introduction
In today’s fast-paced world, efficient and accurate documentation is essential for various industries, from construction and real estate to the mining and energy sector. Traditional documentation methods often involve cumbersome processes and human error, making them time-consuming and prone to mistakes. However, with cutting-edge technologies like autonomous photo documentation, organisations can simplify documentation tasks and improve productivity. In this blog post, we will explore just how easy it is to use Autonomous Photo Documentation with Karelics.
Table of Contents
Understanding Autonomous Photo Documentation
Autonomous Photo Documentation, often abbreviated as APD, is a revolutionary technology that leverages artificial intelligence, computer vision, and robotics to streamline capturing, organising, and managing visual data. Karelics is at the forefront of this technology, offering an intuitive and user-friendly solution that makes the entire process seamless.
The Ease of Getting Started
One of the key advantages of using Karelics for Autonomous Photo Documentation is how easy it is to get started. Whether you’re an individual professional or part of a larger organisation, the onboarding process is designed to be user-friendly and straightforward. Here’s a step-by-step breakdown:
1.
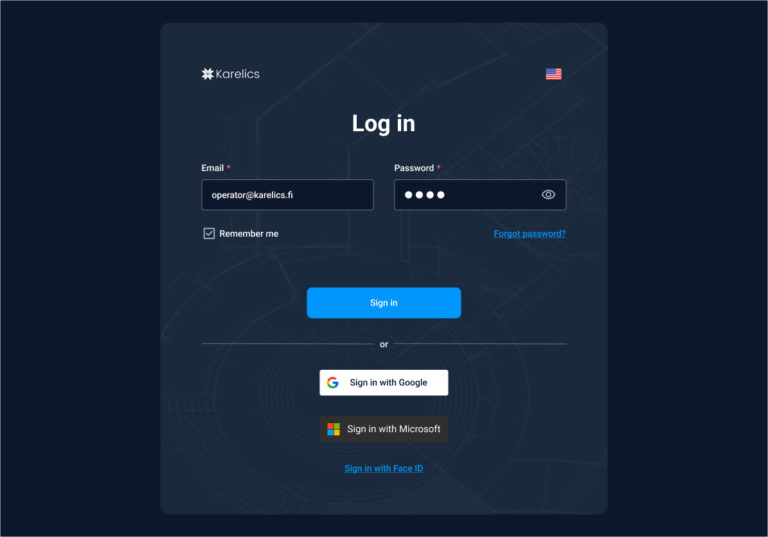
Log in: Start by logging in to your account on the Karelics Cloud platform. Karelics is responsible for adding your company to the cloud and providing access credentials.

2.
Hardware Setup: We provide users with a unique payload for their robots, equipped with depth cameras, a 360 camera, a 3D LIDAR, and computers designed to work seamlessly with their platform. Setting up the payload is as simple as plugging it into your robot and connecting it to your network.

3.
User Training: We offer excellent user support and resources to help you get started. Our training materials, tutorials, and customer support ensure you can quickly learn how to use the platform effectively.
Capturing Visual Data Made Simple
Once you’ve set everything up and brought your robot platform to the Karelics ecosystem, capturing visual data becomes a breeze:
1.
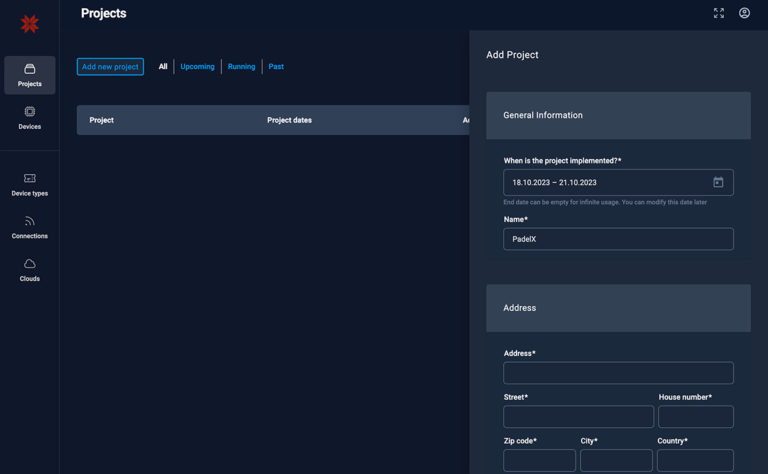
Create a new Project: Define your project parameters within the Karelics Cloud platform. You can specify areas of interest and other project-specific details.
2.
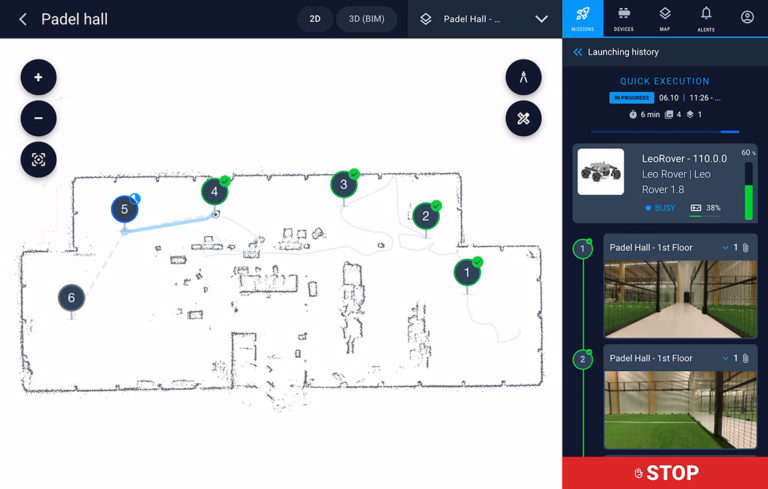
Autonomous Capture: Once the area has been mapped – you are good to go. The robot will autonomously capture high-quality images according to your parameters. They can cover large areas and even access hard-to-reach places, reducing the need for manual labour and human supervision.
3.
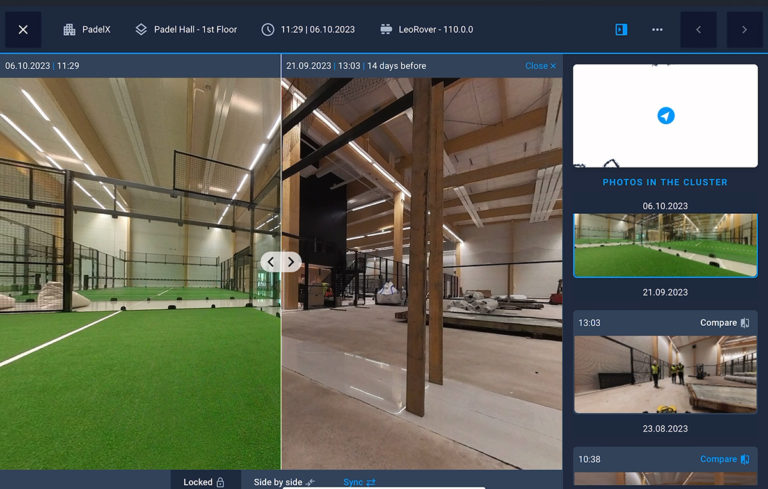
Instant Data Access: All captured data is instantly uploaded to the cloud, where you can access it anywhere. Track the progress of your site with Timeline feature and Photo Comparison. The user-friendly interface allows you to review and manage the visual data easily.
Conclusion
Autonomous Photo Documentation with Karelics is a game-changer in visual data management. Its user-friendly setup, autonomous capture capabilities, and advanced AI features make it incredibly easy for individuals and organisations to streamline their documentation processes. Whether in construction, real estate, insurance, or any industry that relies on visual data, Karelics offers a powerful and accessible solution to meet your needs. Say goodbye to tedious, error-prone documentation methods and embrace the ease of Autonomous Photo Documentation with Karelics!
Autonomous
сonstruction site
Photo documentation
Document your construction project progress with Karelics!

