
How to use frontend environment variables without rebuilding the Angular app
A DevOps engineer needed to pass environment variables to the container with the frontend to apply without rebuilding the container again. Angular does not provide
A DevOps engineer needed to pass environment variables to the container with the frontend to apply without rebuilding the container again. Angular does not provide
Introduction In today’s fast-paced world, efficient and accurate documentation is essential for various industries, from construction and real estate to the mining and energy sector.
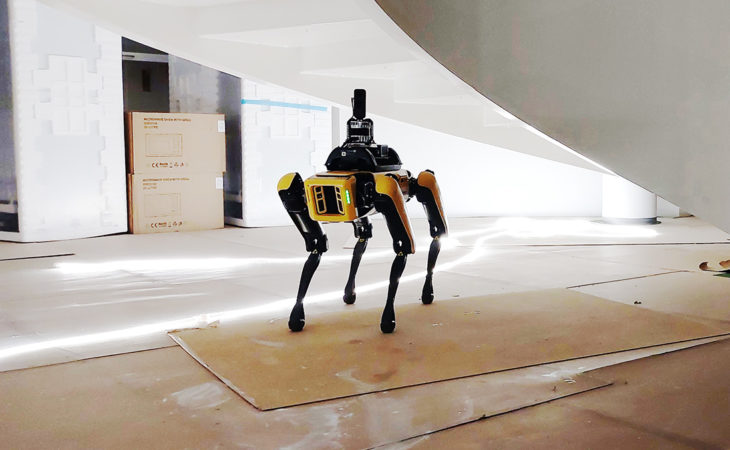
In our platform, Karelics Cloud, we strive to automate repetitive tasks and improve interactions with robots through our robotic fleet management capabilities. As part of
xAfter years of experience of working with ROS and robotics, we’ve seen a fair share of weird and surprising bugs and issues. I wanted to

It happens in agile development when you want to have some feature implemented and deployed, but at the same time to be available only for

Our recent migration of Karelics Brain from ROS 1 to ROS 2 had our whole team learning a lot of new things in a relatively
The world is highly complex. To operate in this complex world with self-driving robots, it would be hard to program all the tasks by hand,
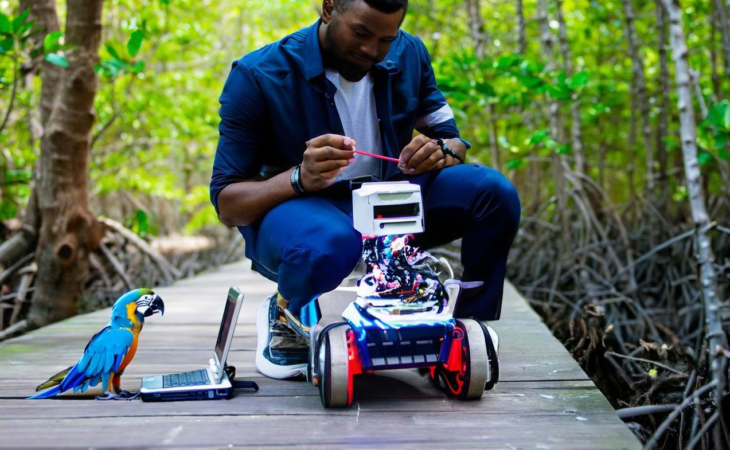
The first question that you face when building a Robot is what should be the best size for it. There are several ways to do

Last year, I got an incredible opportunity to join a team at University of Eastern Finland and compete in MineRL competition. The competition sponsored by
