
XploreR – Autonomous Exploration with Virtual Reality Visualization
The goal of the XploreR project was to apply autonomous exploration using a single robot. In the next step, we combined the autonomous exploration algorithm
The goal of the XploreR project was to apply autonomous exploration using a single robot. In the next step, we combined the autonomous exploration algorithm
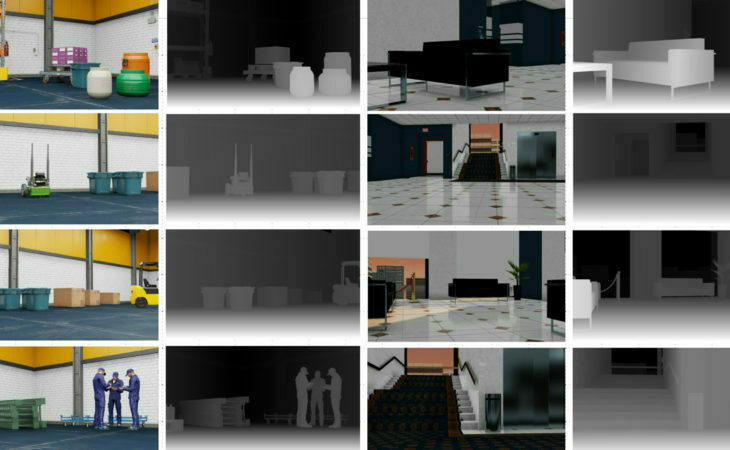
Depth estimation plays a big role in robotics, autonomous driving (mapping, localization and obstacle avoidance), augmented reality and many other computer vision technologies across many
