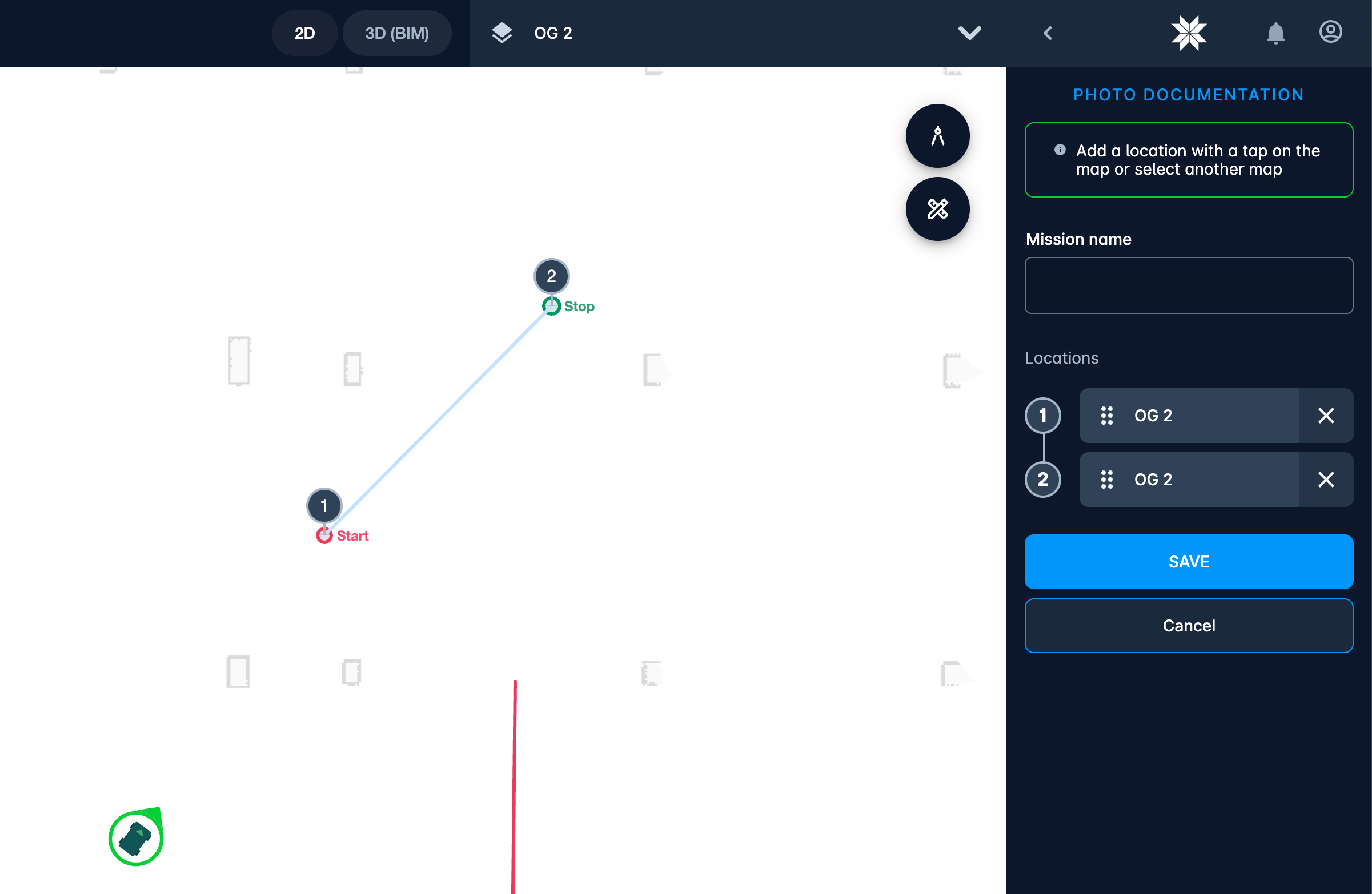
It is now possible to save the mission.
Now quick executions can be saved as a mission.
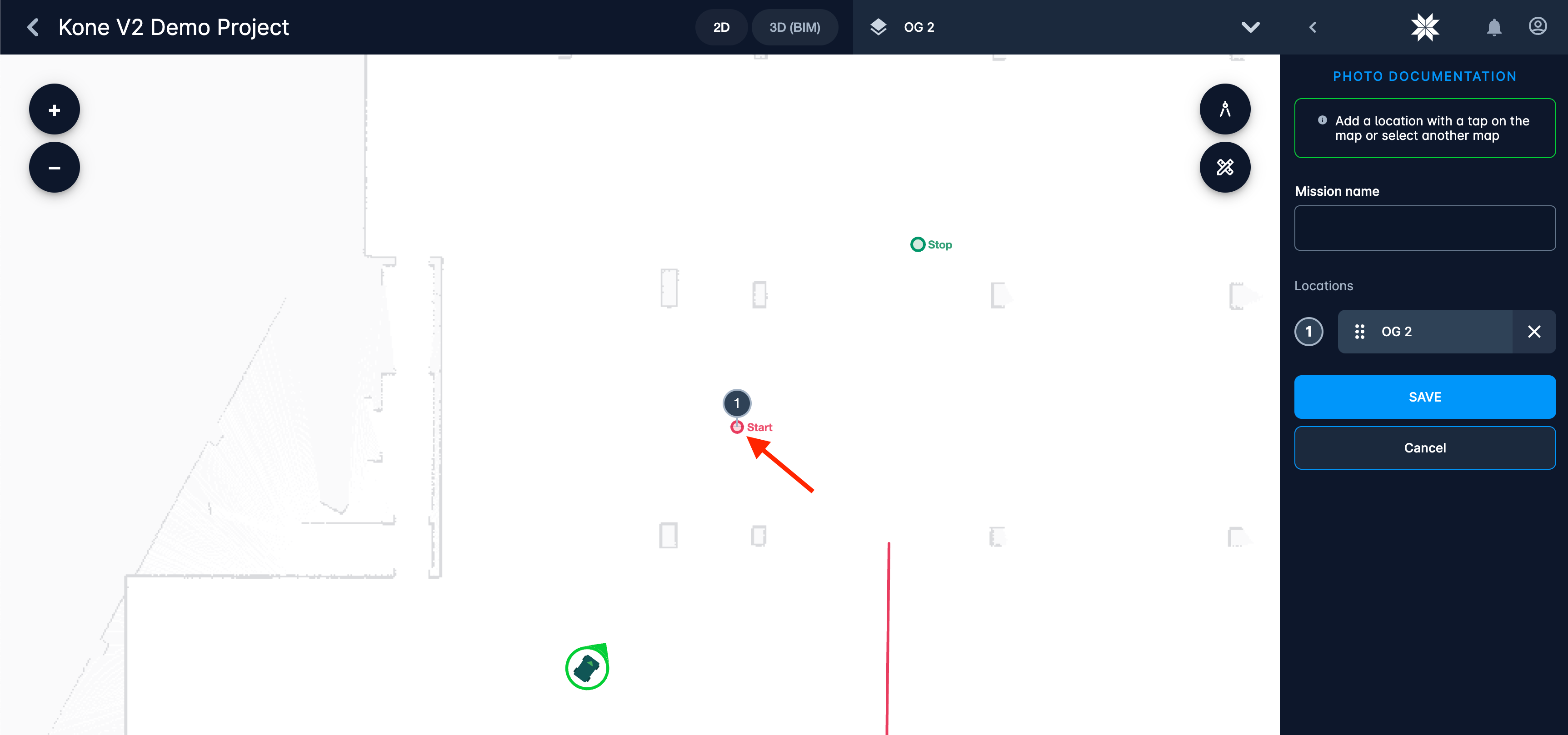
When operator clicks at navigation point – its coordinates will be taken as coordinates of the step and not the coordinates of cursor. It is especially useful when user positions the robot first → saves coordinates of robot as navigation point → and then uses this navigation point in the mission step. This way navigation can be more predictable.
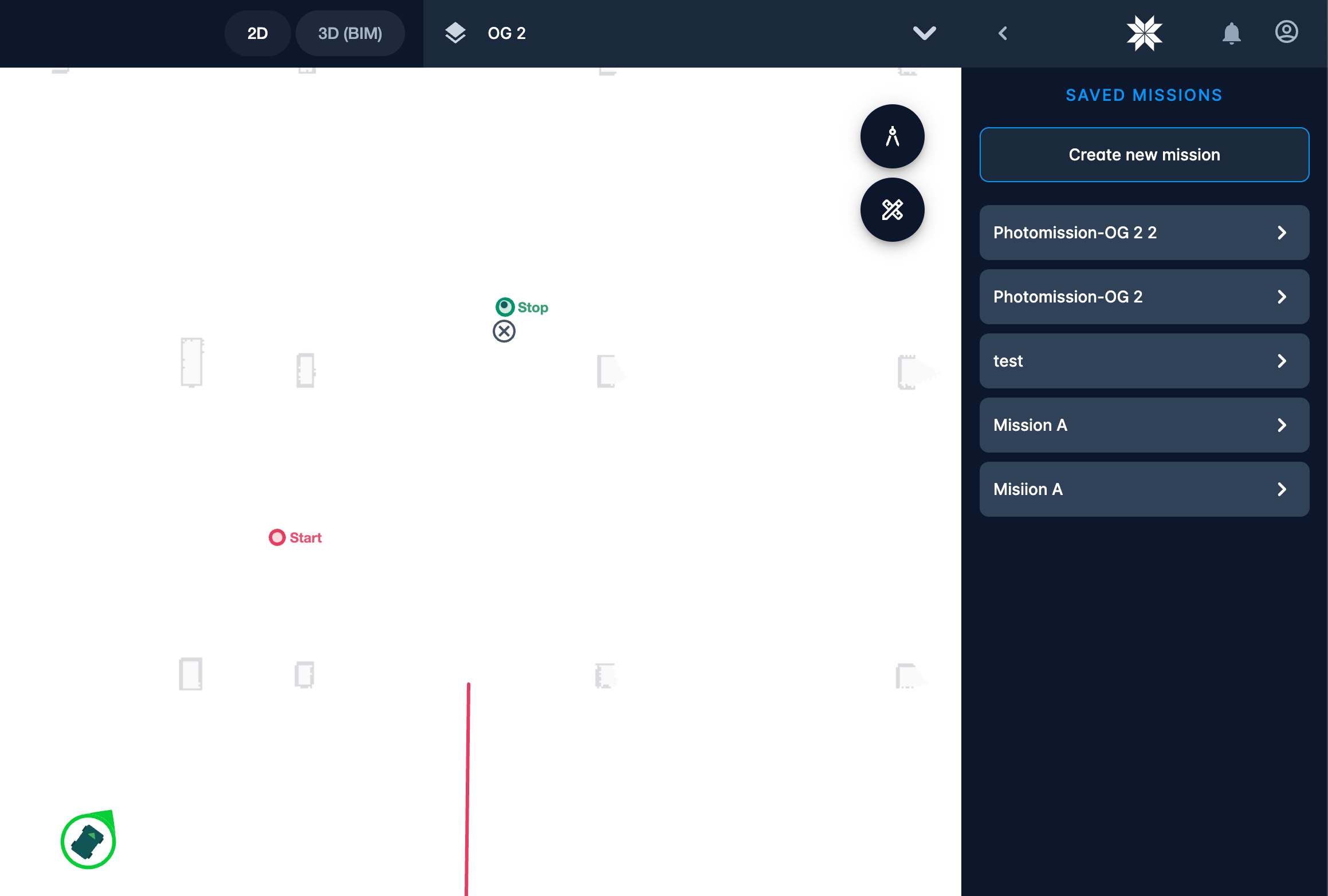
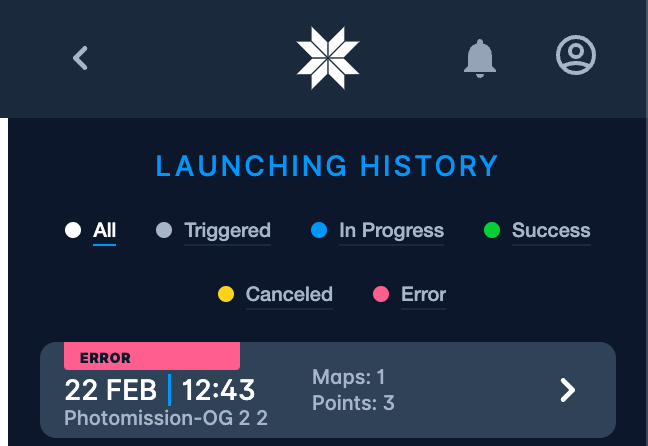
Now it is possible to see only missions from a certain status: only successful, only canceled, these that are now in progress.
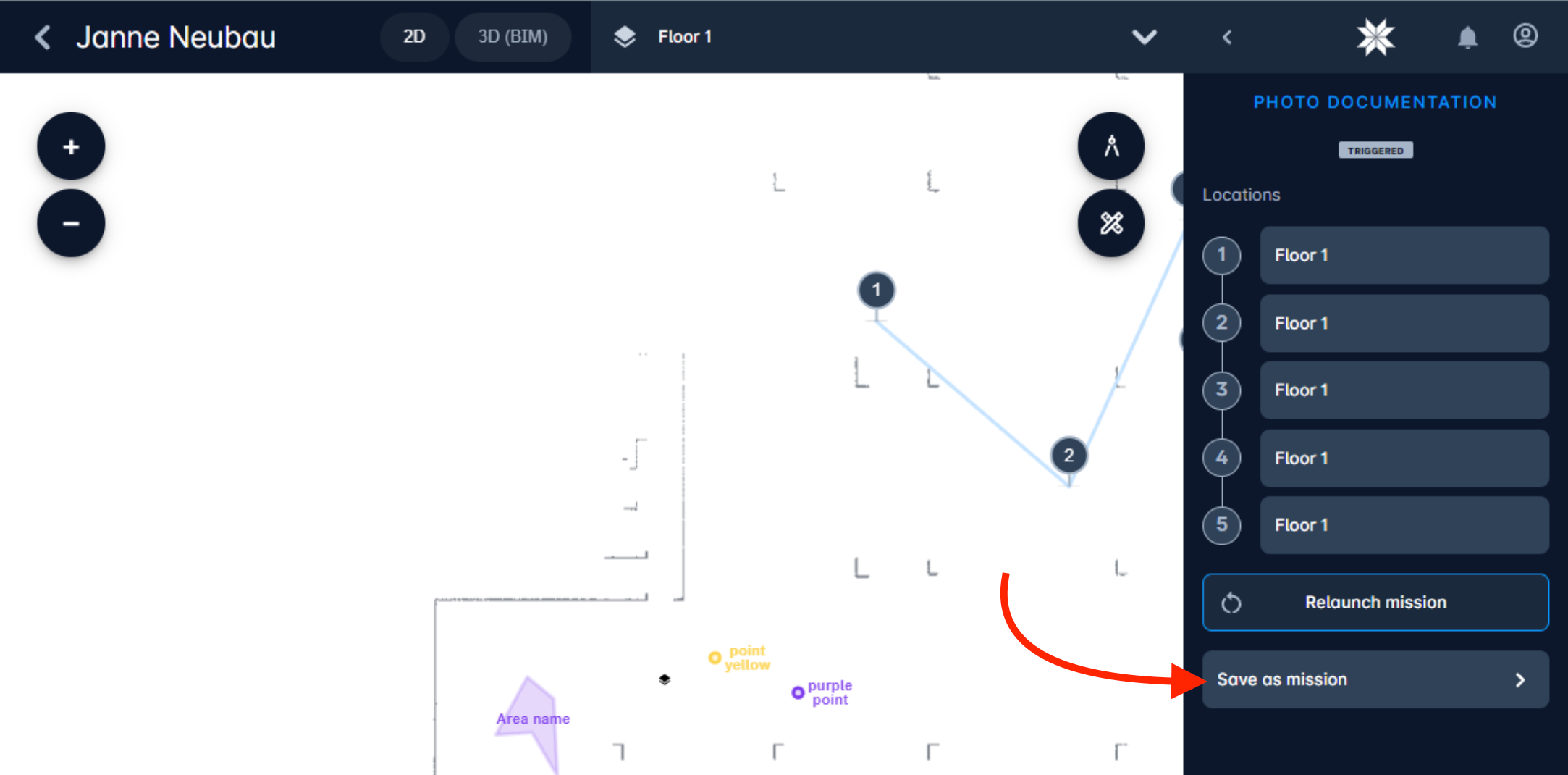
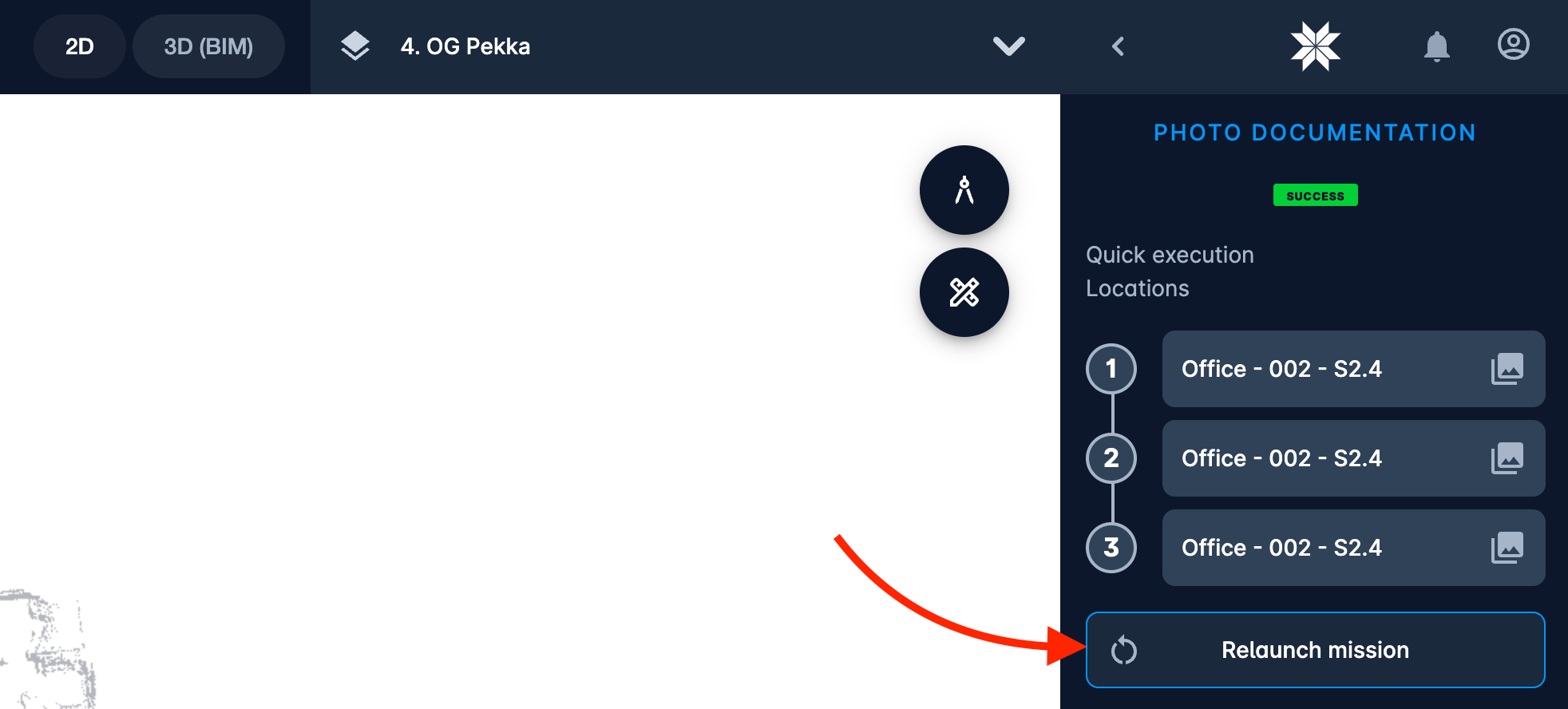
Now operators have a way to quickly relaunch the mission. Little feature but saves time a lot.
Now downloaded photos include more relevant information for storing them properly:
<project name>-<floor name>-<number of point in a mission>-<date and time>
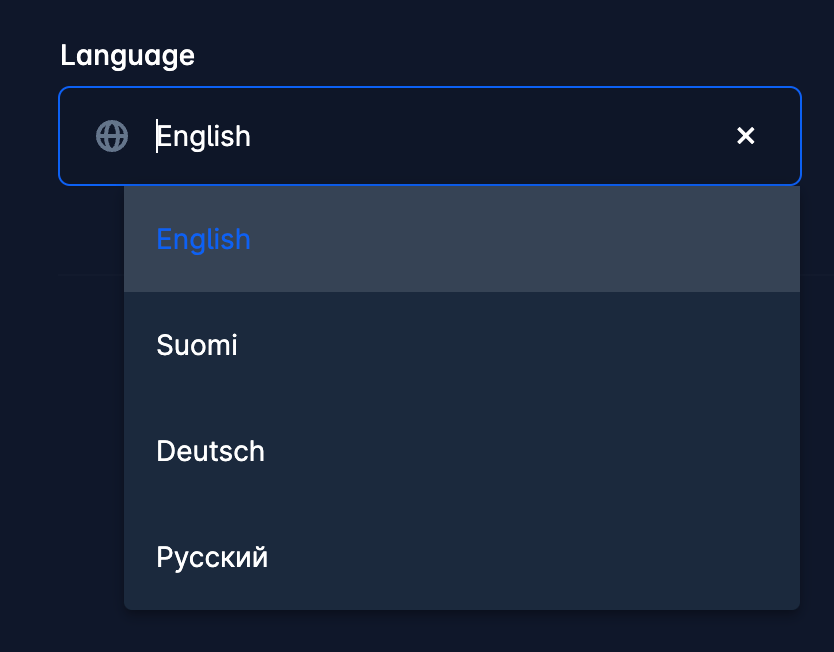
Every user can set it in his user profile. English remains the default language.
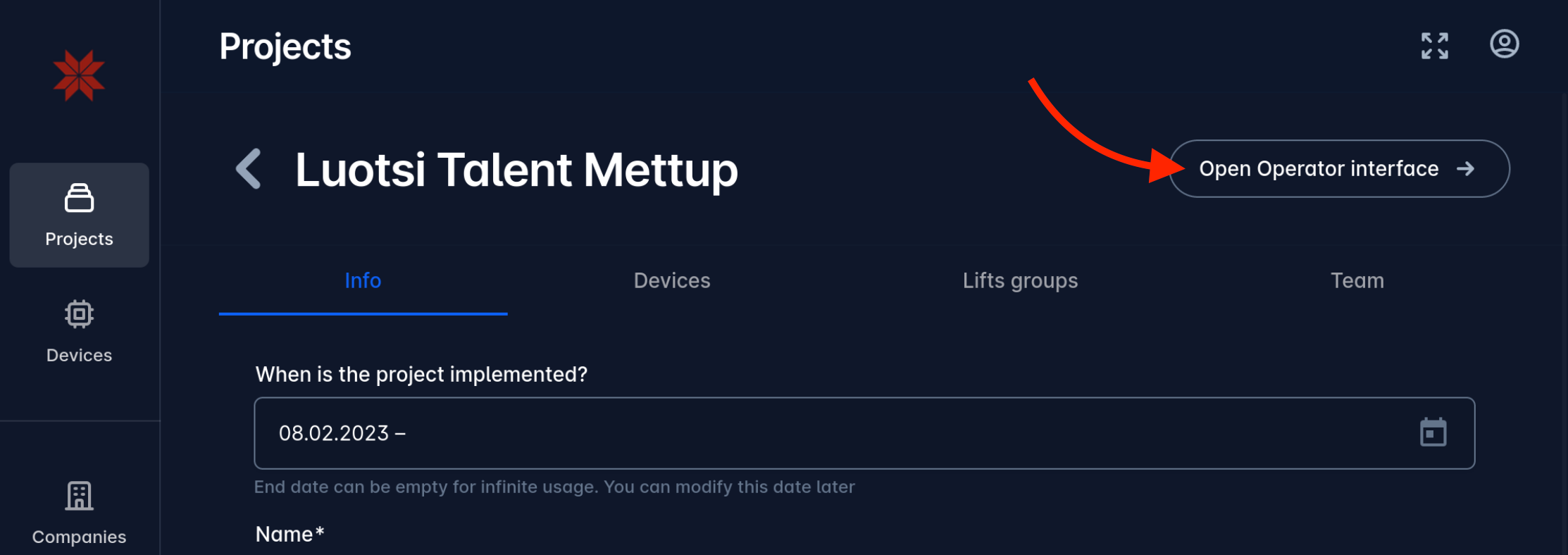
Added link to open project in operator UI
Now project configurators don’t need to search for their project by name in operator UI. There is new button to open selected project directly from configuration interface.
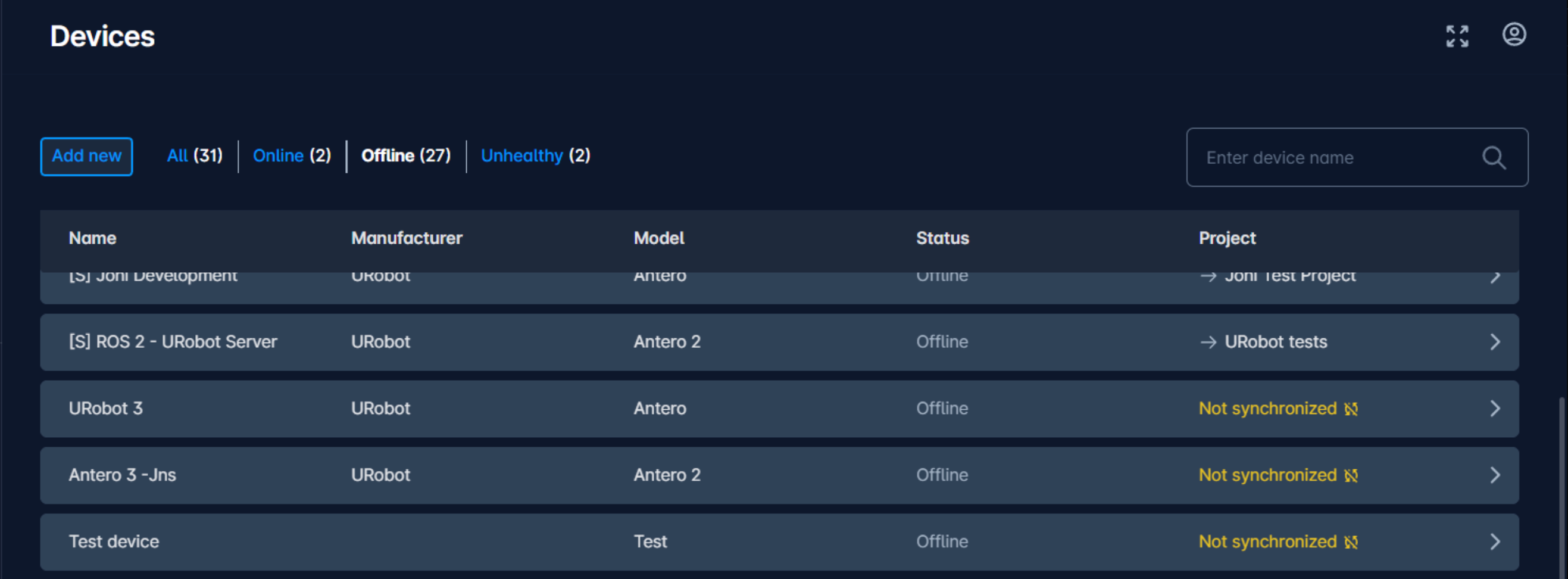
Now headers of devices and projects tables are fixed making it easier to use when the lists are big.
Improved mobile support for tablets and mobile devices. Now table will automatically switch to cards view on smaller screens. New redesigned card is more compact but shows the same amount of information. Construction project configurators can configure the project or get the overview without a need to open the laptop being on the construction site.
On mobile devices we have added the filter area on top of the list of device cards. Construction workers can filter robots by online status and by name.
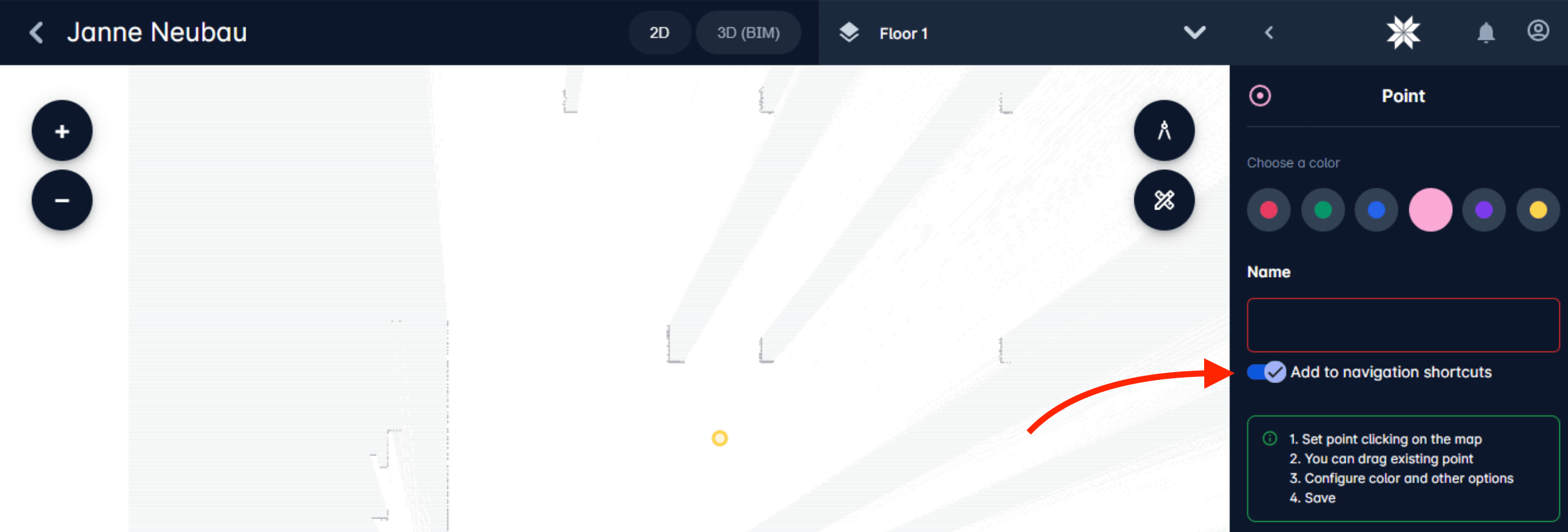
Navigation points are by default with shortcut
We have noticed that majority of points are created with shortcuts – so we have decided to eliminate one extra click.
Displaying the name of point
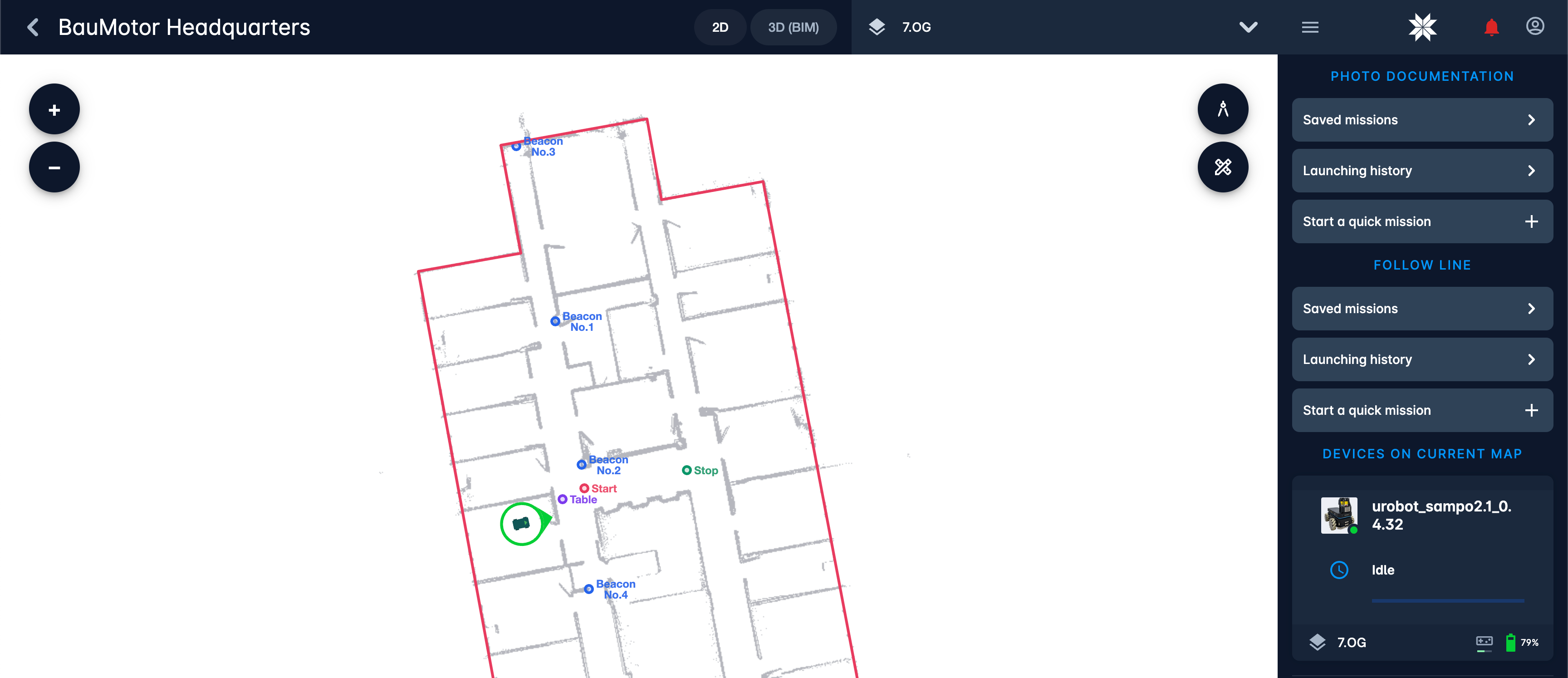
Now we show the name of navigation points on the map.
Following device when it switches the map
When a device is selected in the right sidebar and we are on the map of that device and this device is switching the map to another map – then we will change UI to that map where this device has switched to and zoom to device.
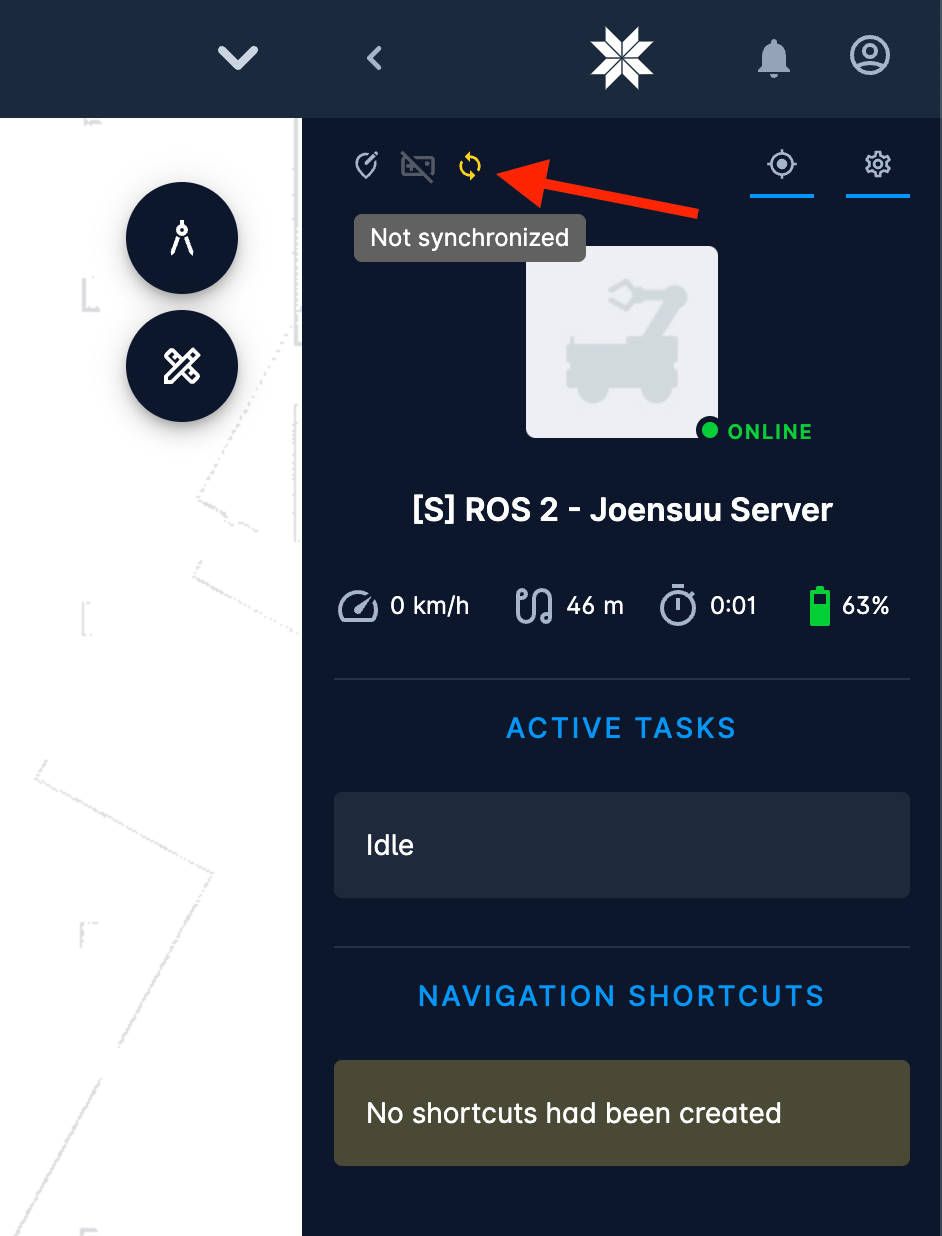
Indicator shows when device is not fully synced with cloud. Typically needs short time to be online to fully sync.
Create new floor while device is in mapping mode
Now it is not possible to save the map while robot is building the stairs map. This is a little technical limitation but helps to keep stable navigation between the floors.
Now we show online status if the mini-cloud is connected to the main cloud.
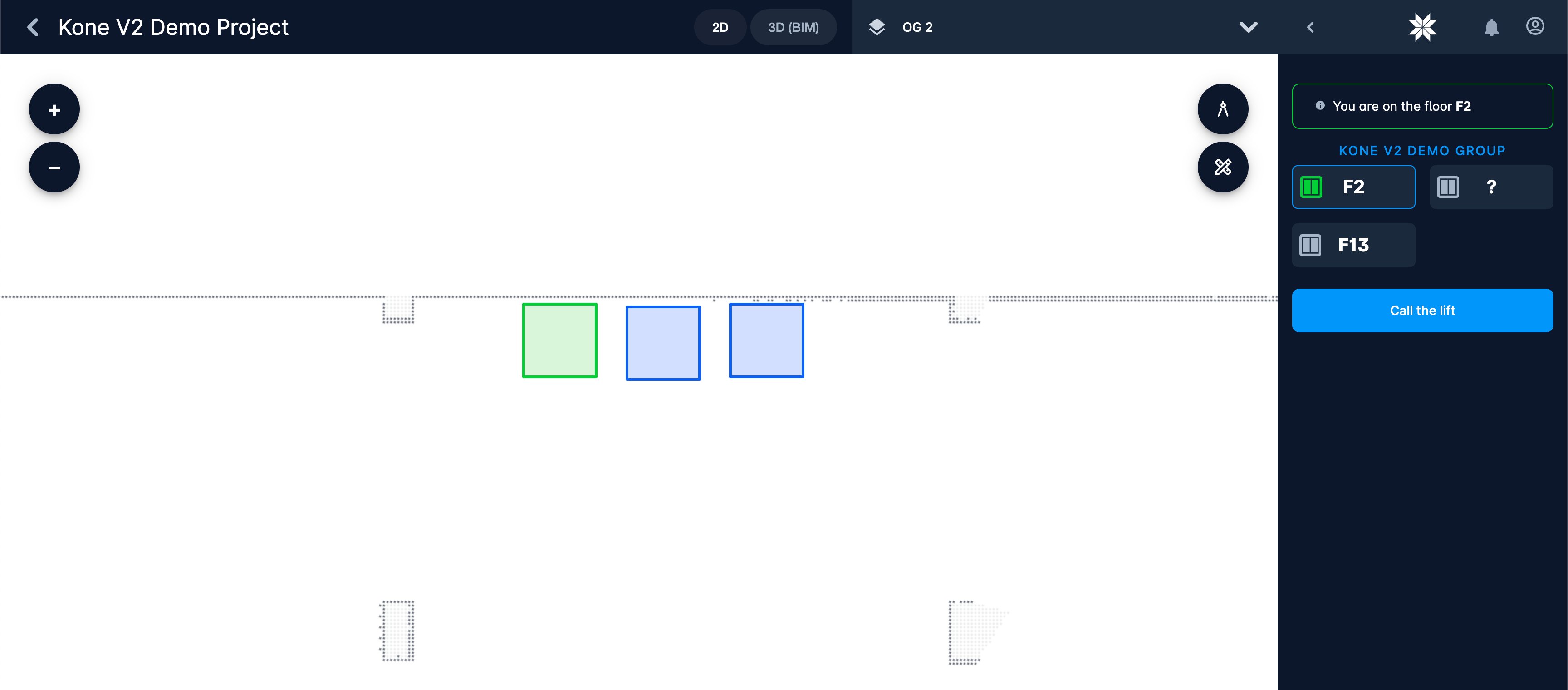
Elevator which cabin is on floor is highlighted on the map. It helps operator to see if the cabin has arrived. This happens in real time.